







 超级会员免费看
超级会员免费看
1,消除稳态误差
积分项目是对于历史误差进行的累积,可以理解,系统的误差累积表示不断的在减少误差,最终消除误差,这个过程需要将误差进行累加,才可以真正知道误差的大小是多少,用最终累加的误差作为积分项目,去消除误差,保证系统的稳态。
举个例子,如果系统在稳态下有一个扰动的话,这个扰动是保持的一直存在的,系统需要补偿这个扰动就需要对这个扰动误差进行累积,累积到历史的误差上面,这就是误差累积,最终到一个能够消除整个误差的状态,保证系统稳定。
其中我们会加入比例项目,是为了快速达到稳态,否则只有比例项的话,比例系数KI太小,进入系统稳态时间太长,太大会导致振荡严重,所以需要一个KP,让系统快速进入稳态,有了KP的帮助,KI就可以给的很小,便可快速进入稳态,而且KI比较小,不至于由于积分项目的变化太大,导致系统振荡。
下图是只有KI的情况,振荡很厉害,如果KI参数太小,又很长的时间不会到达目标值
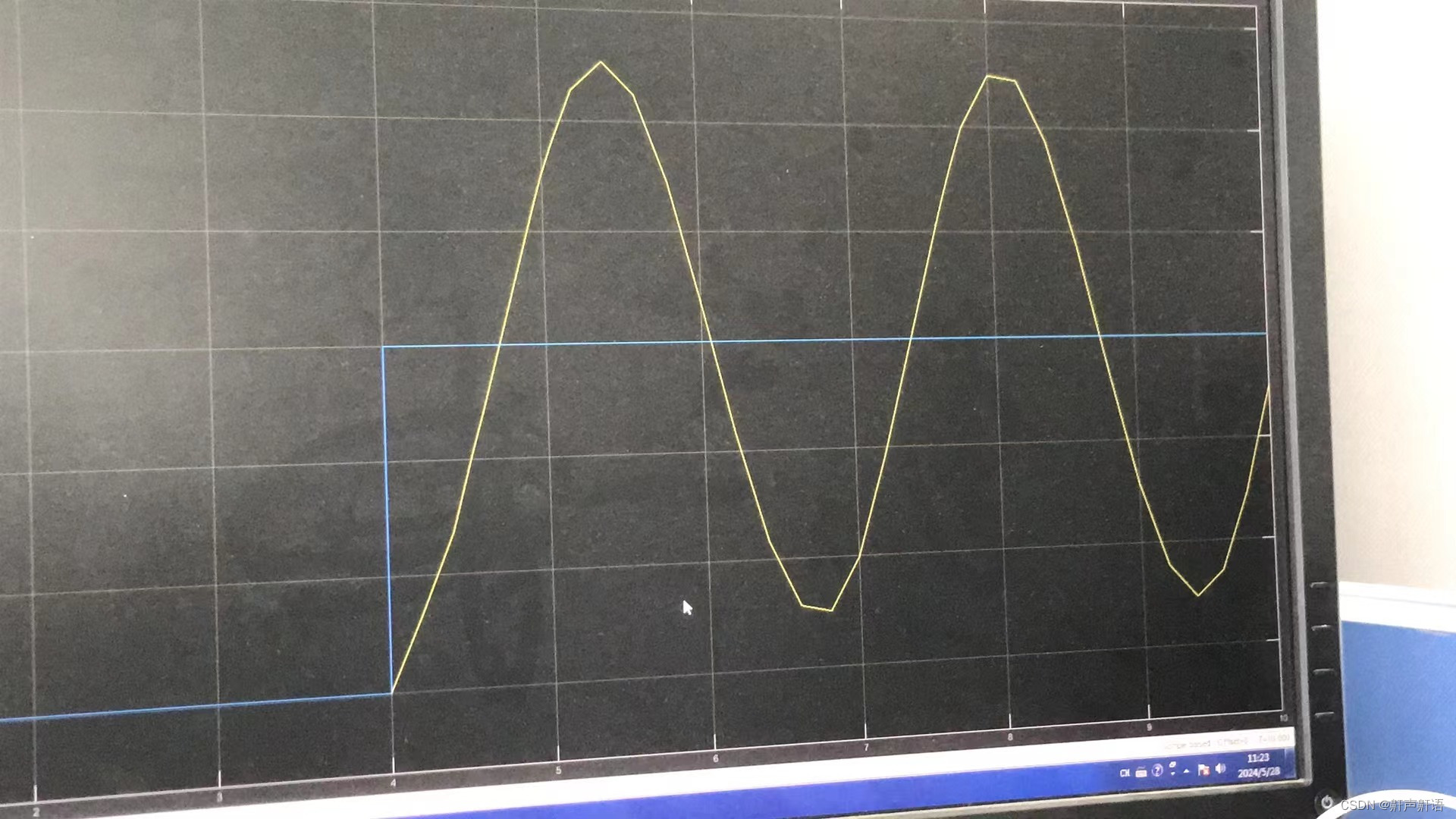

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 657
657

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











