







 本文简要介绍了机器人导航和计算机视觉中的核心概念:Odometry、Relocalization和SLAM。Odometry用于估计机器人位置变化,易受累积误差影响;Relocalization在机器人失去定位后重新定位;SLAM则同时构建地图和定位。两者结合解决了SLAM中的定位和误差修正问题。文章探讨了这些技术的研究现状、挑战及未来前景,并提供了Python Odometry代码示例。
本文简要介绍了机器人导航和计算机视觉中的核心概念:Odometry、Relocalization和SLAM。Odometry用于估计机器人位置变化,易受累积误差影响;Relocalization在机器人失去定位后重新定位;SLAM则同时构建地图和定位。两者结合解决了SLAM中的定位和误差修正问题。文章探讨了这些技术的研究现状、挑战及未来前景,并提供了Python Odometry代码示例。
注1:本文系“简要介绍”系列之一,仅从概念上对计算机视觉和机器人导航中的Odometry、Relocalization和SLAM进行非常简要的介绍,不适合用于深入和详细的了解。
航行家的视觉:理解Odometry, Relocalization和SLAM的区别与联系

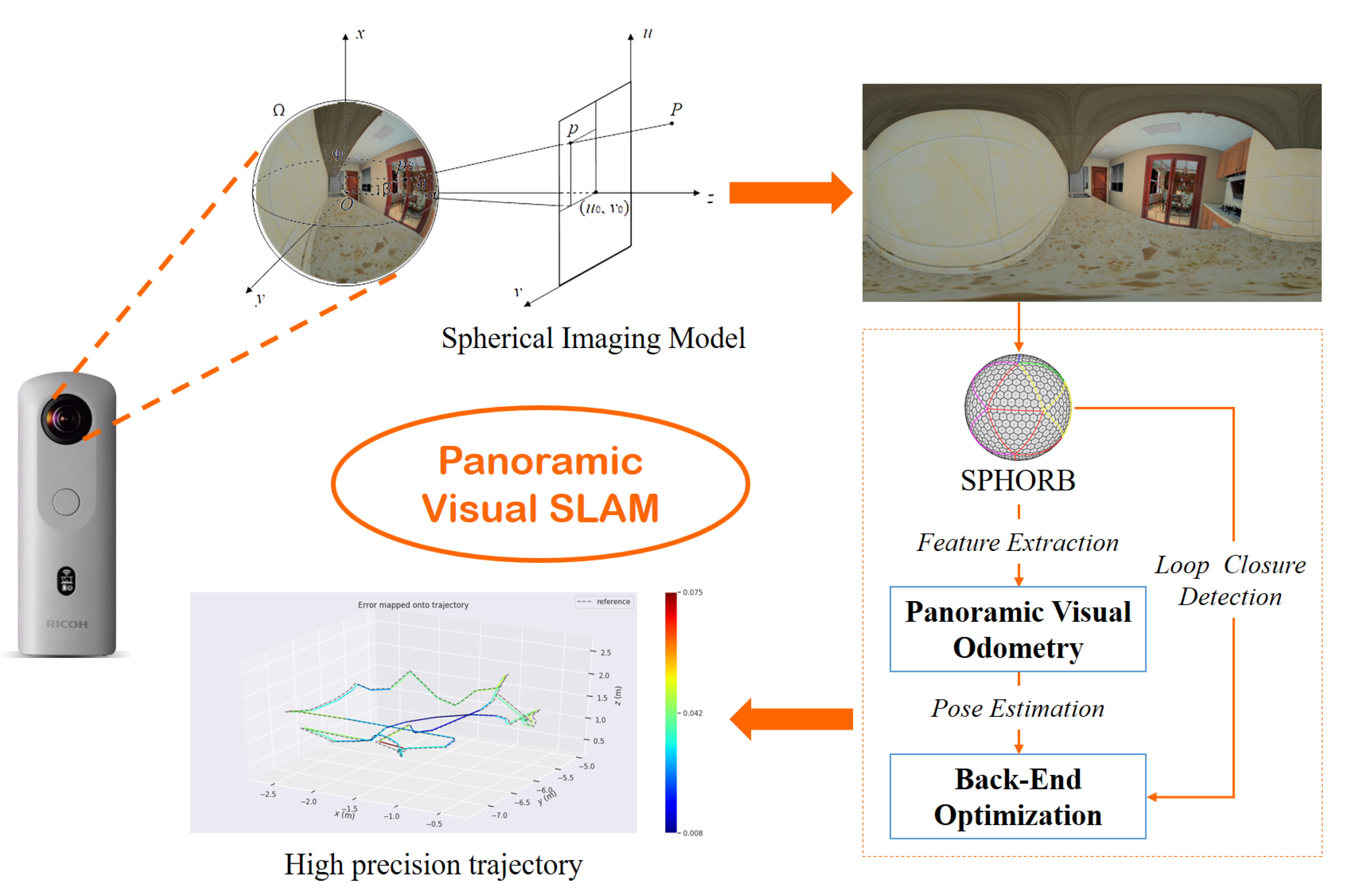
Sensors | Free Full-Text | Panoramic Visual SLAM Technology for Spherical Images
背景介绍
在机器人导航和计算机视觉领域中,有三个核心概念:Odometry,Relocalization和

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 9870
9870

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












{kind=link}