







 本文介绍了汽车操稳性7自由度模型的数学建模和Simulink仿真过程,包括纵向、侧向、横摆运动的方程,以及联合工况下的非线性轮胎模型。通过Simulink模型进行仿真,分析了前轮5°角阶跃输入和10m/s初始车速下的车辆动态响应。
本文介绍了汽车操稳性7自由度模型的数学建模和Simulink仿真过程,包括纵向、侧向、横摆运动的方程,以及联合工况下的非线性轮胎模型。通过Simulink模型进行仿真,分析了前轮5°角阶跃输入和10m/s初始车速下的车辆动态响应。
目录
前言
前面一期文章介绍了悬架控制系列,其主要控制性能指标可概括平顺性和安全性,也就是研究汽车的垂向特性,此外可能与视觉进行结合,但是由于实验限制,所以个人不再往这个方向进行深入,也不代表没有前景,仅个人意愿,言之过度还望理解!
本篇文章主要想开启操稳性方向的新篇,便以操稳性7自由度进行建模和简单常规控制探讨,并记录自己学习的一个过程,最后通过仿真分析测试理论。
此外撰写的原因是因为很多现有的模型或者文献叙述不全面,以致模型建立不完全正确;第二个是因为现在有的模型都是积分模块或者matlab function搭建,但是个人喜欢对于含状态量的模型或控制器采用S函数,且通过个人测试,S函数处理代数换能力更强,所以想在这里做一个全面的模型介绍,以及通过simulink的S函数去仿真分析。
1.汽车自由度简介
以前轮转向的两轴车辆为例,考虑全面一些可以将其定义为17自由度模型,分类方法有几种(个人理解),1:悬架动力学7自由度、操稳性动力学7自由度、2个前轮绕主销的转动自由度及转向横拉杠一个自由度,2.车体绕xyz轴的转动和沿xyz轴的运动共6个自由度,车辆垂向和转动共8自由度,再加上绕转动转动和横拉杠3自由度。
2.操稳性7自由度数学模型
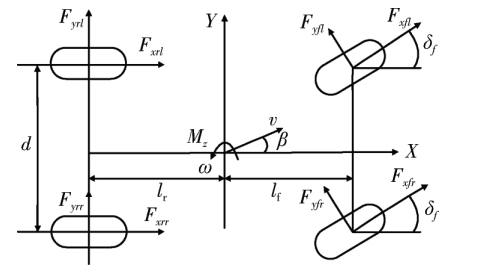
车辆左转时刻的操稳性7自由度模型
纵向运动:
![]()
侧向运动:
![]()
横摆运动:
![]()
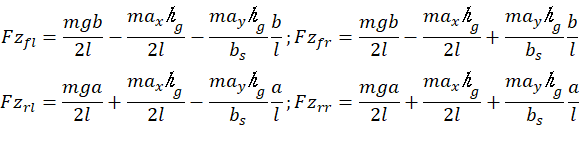
式中,车身俯仰力矩 和侧倾力矩分别为:
![]()
![]()
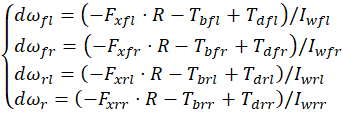
车轮旋转运动:
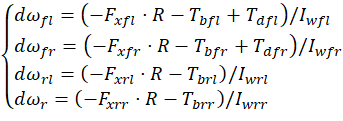
式中,df为前轮距,dr为后轮距,Tb为制动力矩(break),Td为驱动力矩(drive)。
对于上面运动方程中的侧向力和纵向力由轮胎模型来提供,而工况下的轮胎模型通过是驱动/制动+转向的联合工况,所以有必要建立联合工况下的非线性轮胎模型,这里魔术轮胎模型为例:
纯侧偏轮胎模型:

![]()
![]()
纯纵滑轮胎模型:
![]()
![]()
![]()
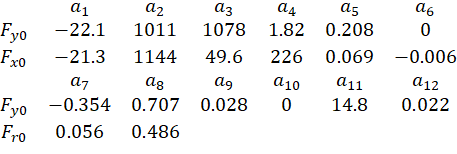
轮胎模型拟合参数
轮胎参数:
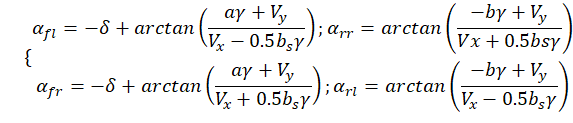
(1)侧偏角:
(2)垂直载荷:
(3)轮胎中心速度:

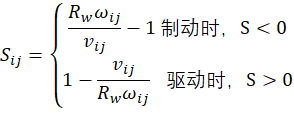
(4)滑移率:
联合工况轮胎模型:


注意事项:
①这里展示的是左转时候的车辆数学模型,其实右转时候会有些偏差,如左转时候的横摆运动俯仰力矩中的纵向力是右-左,写论文时候一定要严谨,读者通过受力分析即可体会。
②有些文章会考虑四轮转向或者前轮驱动等等会有些差异,但其实类推即可,只需注意sin0=0,cos0=1。
③有的文献完善一些会考虑一些阻力,主要有:(这里不考虑坡度)滚动阻力Ff、风阻Fw、坡度阻尼Fi和加速阻尼Fj,其实此时只有纵向运动需要变化。由于坡度阻力需要考虑路面坡度,加速度阻力需要考虑传动比等,所以这里只考虑Ff和Fw并以前轮为例,则纵向运动方程变为:

式中,f为滚动阻尼系数,一般良好路面为0.01;Cd为空气阻尼,其与汽车表面设计有关,现在汽车大约在0.3左右;A为迎风面积,单位m;vx的单位是m/s,如果是km/h则变成书上的形式(余志生——汽车理论)。
④作者在这里进行了详细的整理,四轮驱动时车辆操稳性7自由度模型:


![]()


3.操稳性7自由度simulink建模仿真分析
3.1 simulink模型
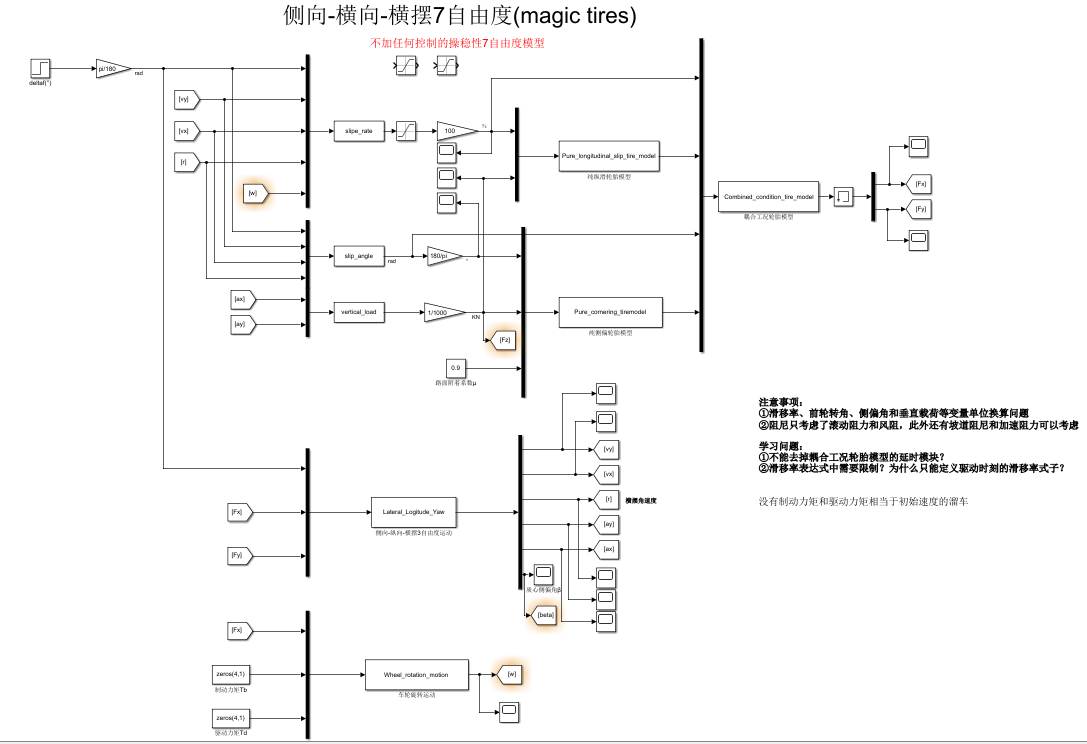
3.2 仿真结果
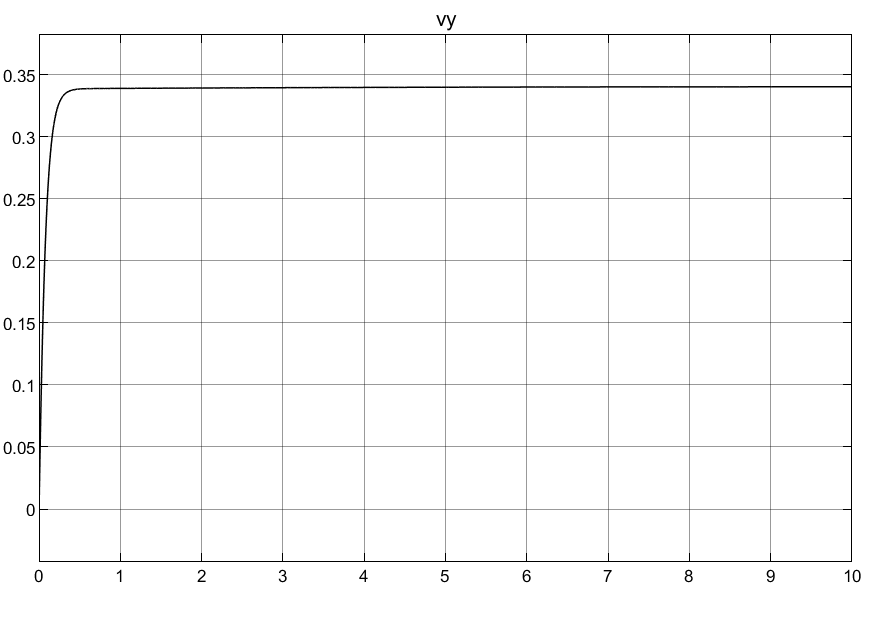
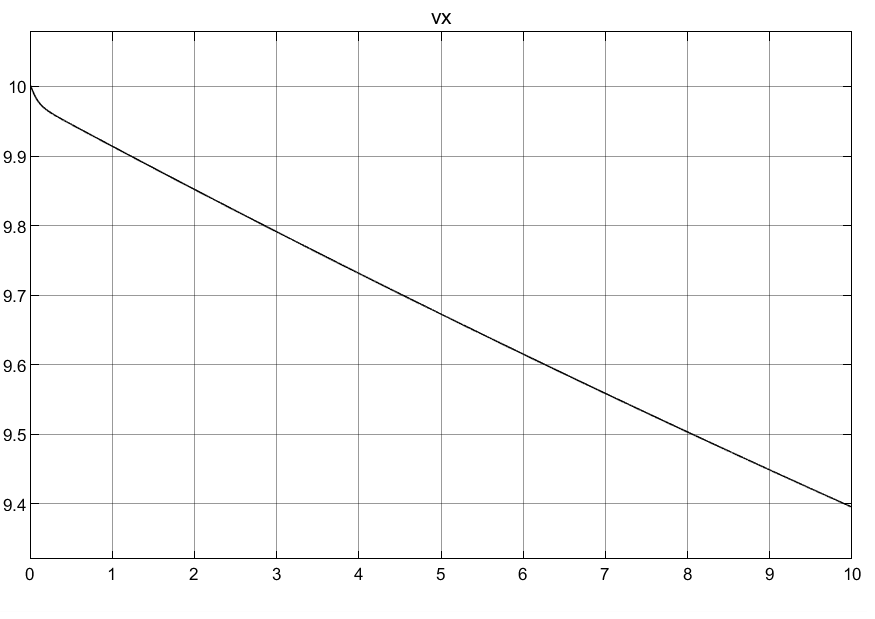
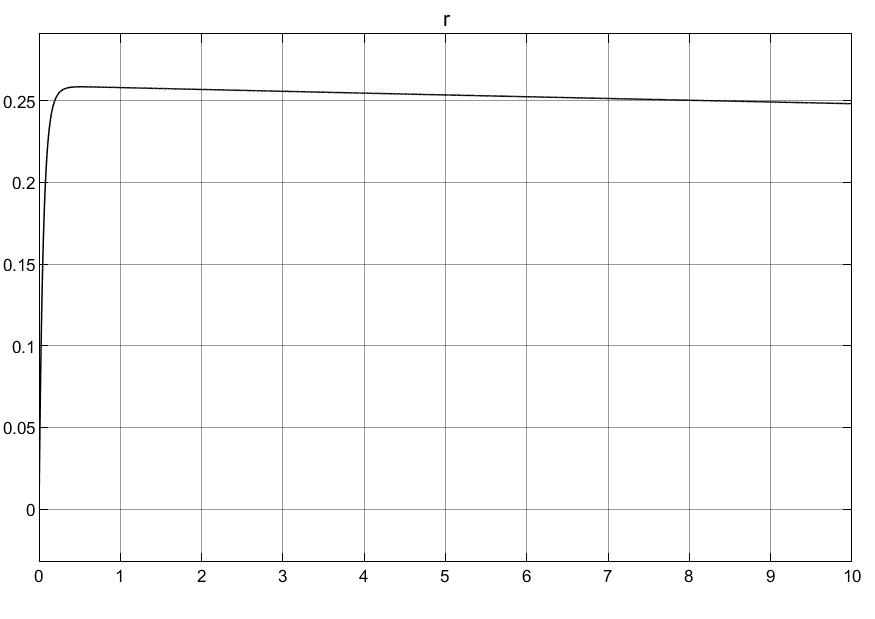
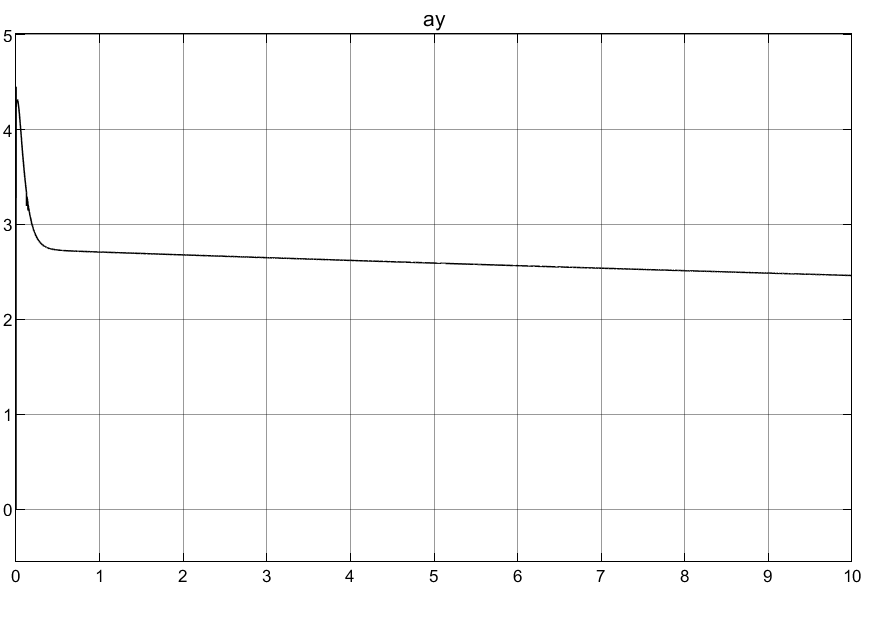
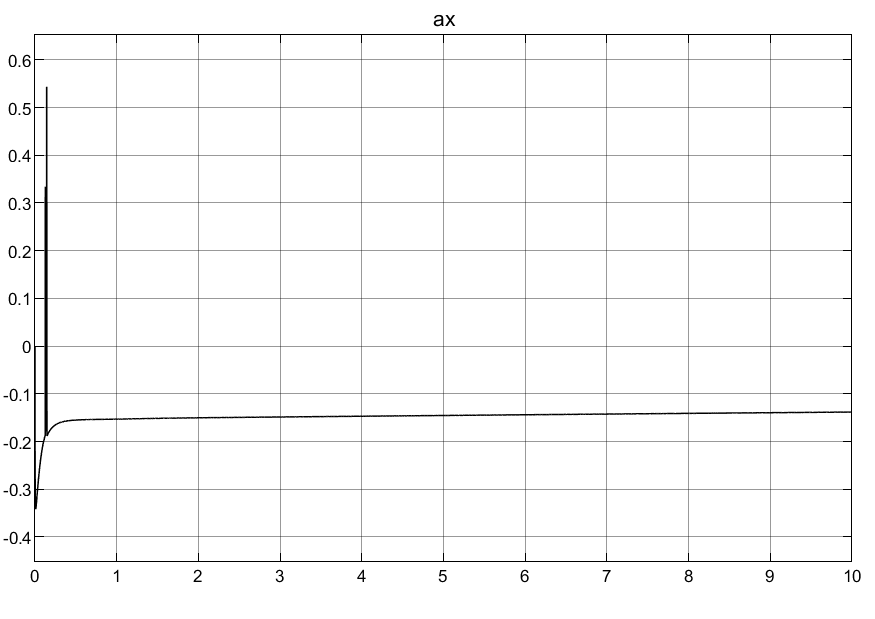
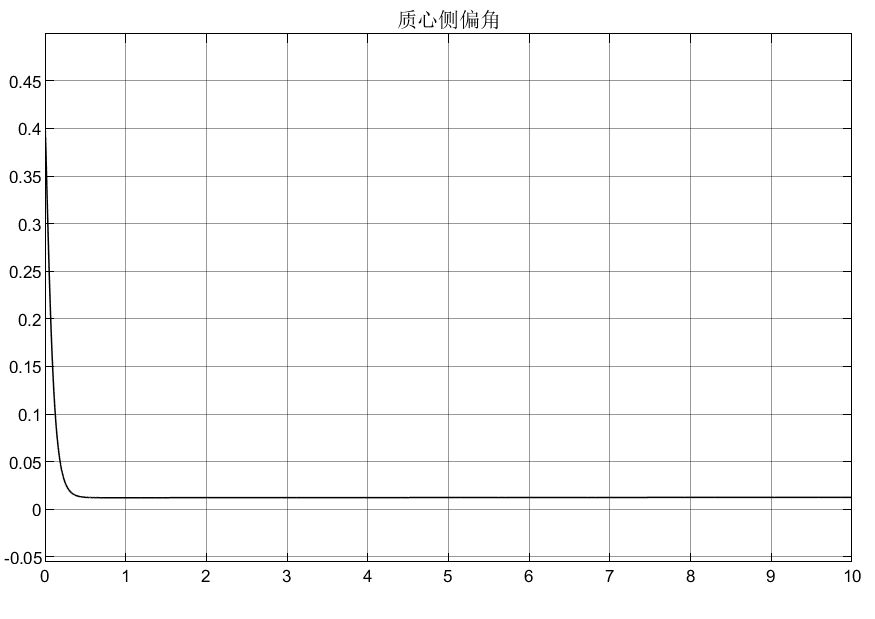
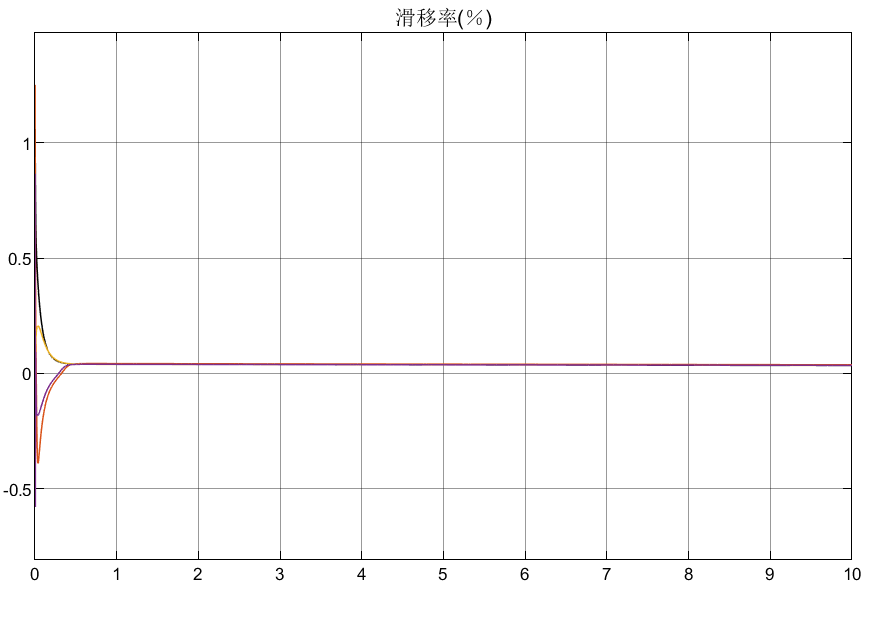
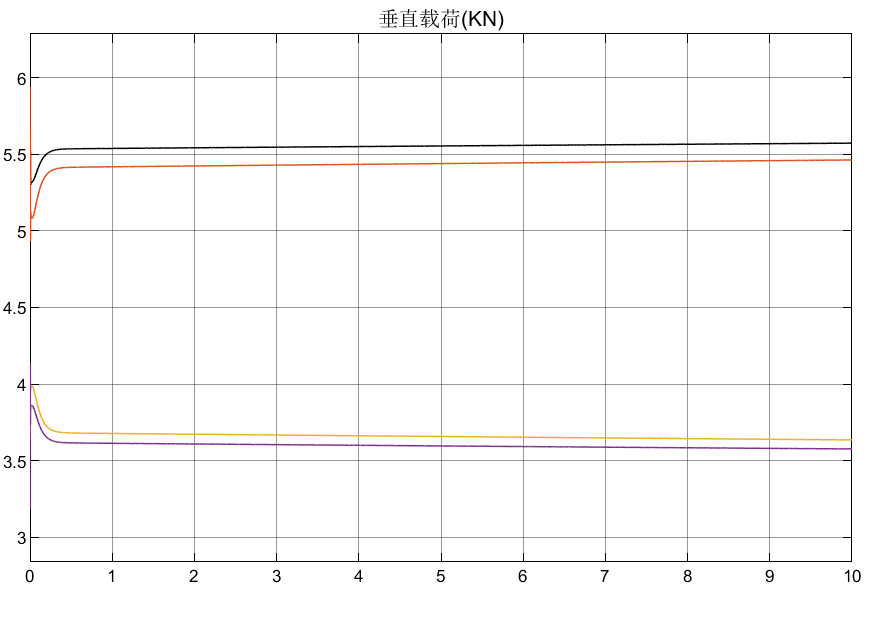
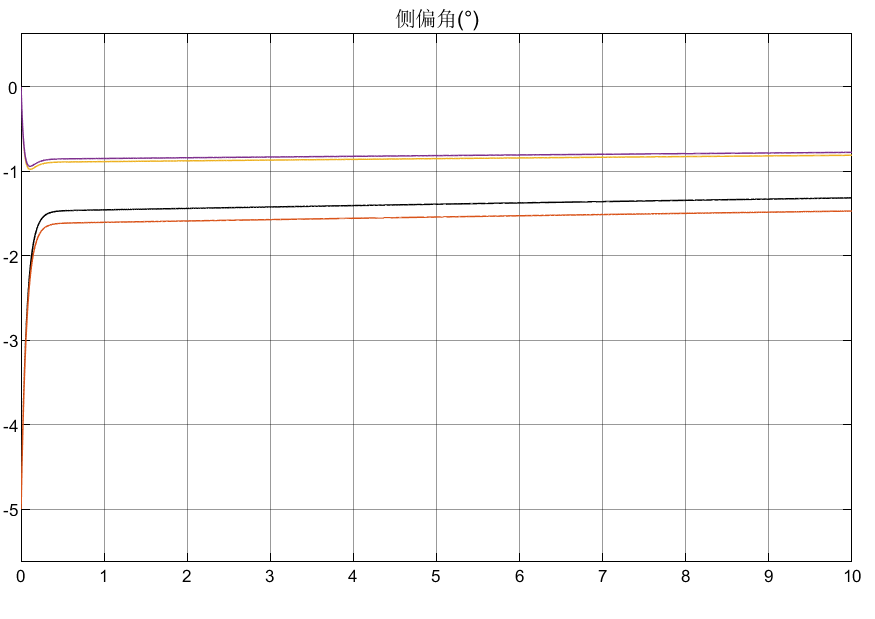
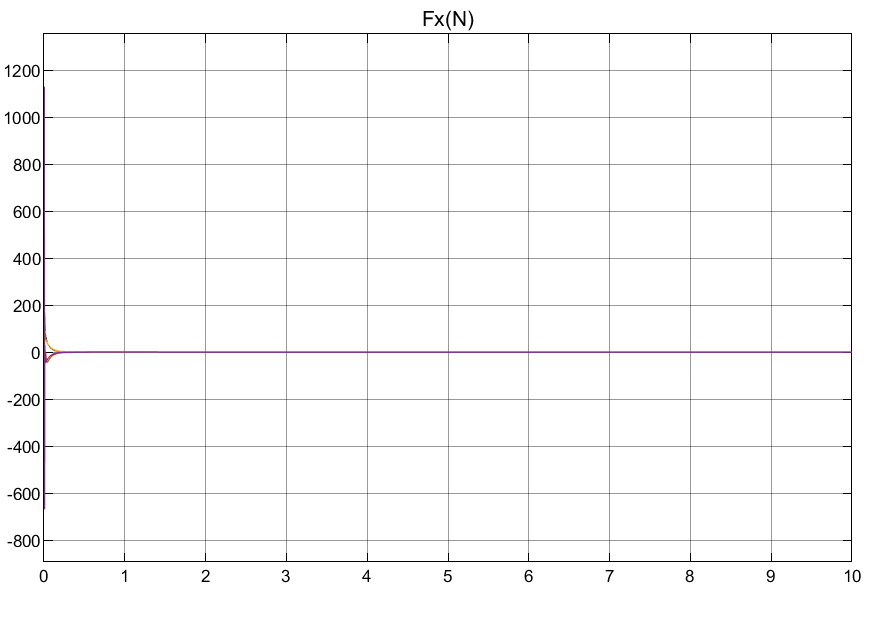
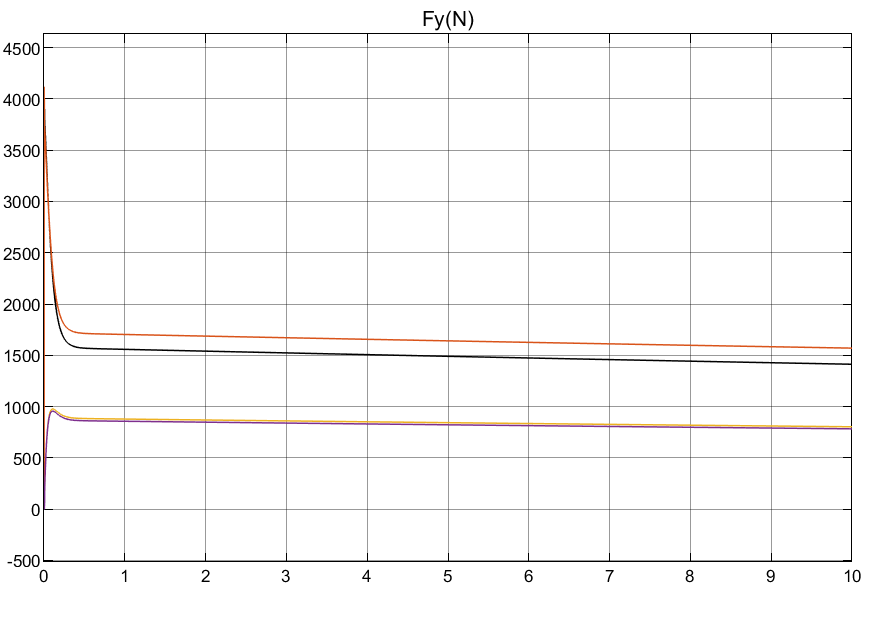
给定前轮5°的角阶跃输入,初始车速为10m/s,仿真结果如下:
4. 总结
(1)单位转换真的非常非常重要!!!
(2)看起来好像和2自由度或者3自由度模型有些对不上?
(3)从纵向车速来看,可以理解为在水平良好路面上做有初始速度的溜车实验。


















 2028
2028

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











