







 本文介绍了使用神经网络进行毫米波雷达目标分类的方法,包括算法理论、激活函数的选择(ReLU、Sigmoid、Softmax)、参数初始化策略以及MATLAB的基本实现步骤。通过合适的特征选取和网络设计,可以提升分类准确率。
本文介绍了使用神经网络进行毫米波雷达目标分类的方法,包括算法理论、激活函数的选择(ReLU、Sigmoid、Softmax)、参数初始化策略以及MATLAB的基本实现步骤。通过合适的特征选取和网络设计,可以提升分类准确率。
目录
一、前言
毫米波雷达以高适应性低识别力著称,但选择适合的分类算法依然可以达到85%甚至95%以上的准确率。一般工程做选择距离信噪比经验公式来做类型判断;置信度通过信噪比(反射强度)、跟踪命中次数及丢失次数来计算。
之前工程中看到SVM与NN相关分类准确度比较,NN超平面学习效果比SVM提高的多。NN在分类上仍少不了传统特征分析与选取,神经元个数,层数,激活函数、损失函数设计,学习率等参数的调整。本篇基于西瓜书matlab实现最基本的NN,特征的选择。
二、算法理论
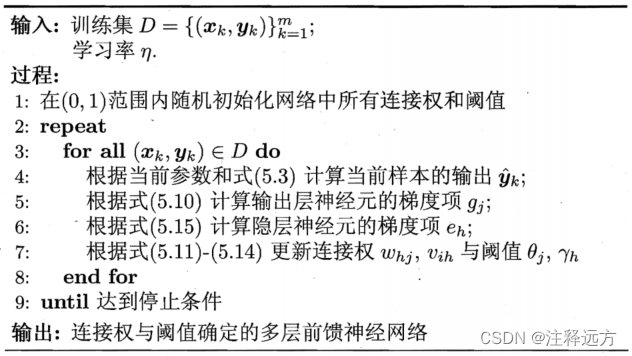
BP网络及算法如下所示:
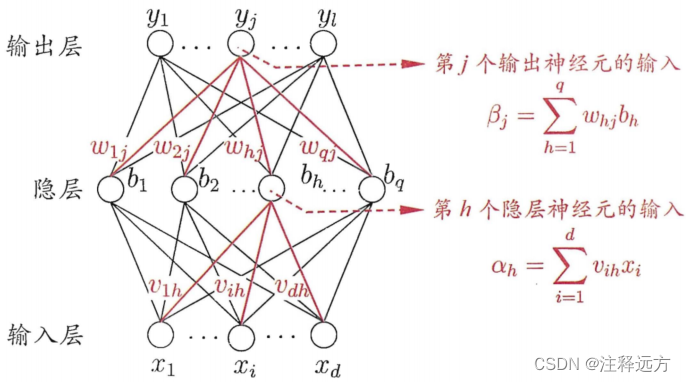
5.3到5.17的公式可以根据南瓜书看具体推导,这里我们可以先只关注结论即可,误差逆传播算法如下:
三、激活函数
激活函数就是在原来的线性组合的基础上加上非线性函数,让模型的表达能力更强。
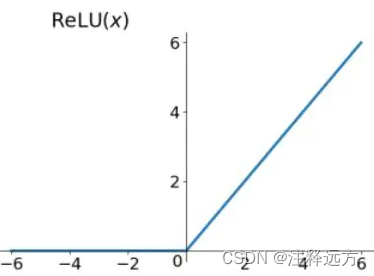
ReLU(Rectified Linear Unit) - 用于隐层神经元输出,Relu实质就是个取最大值的函数
f(x) = max(0,x)。
优点:
输入是负值的情况下,它会输出0,那么神经元就不会被激活。这意味着同一时间只有部分神经元会被激活,从而使得网络很稀疏,进而对计算来说是非常有效率的。
缺点:神经元很容易“死亡”,因此需要设置较小的学习率
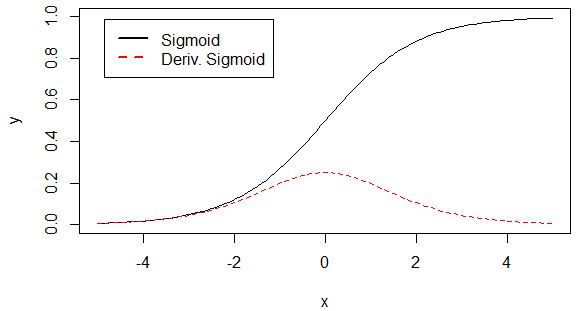
Sigmoid - 用于隐层神经元输出,对于二分类的神经网络来说,最后一层的激活函数一般都是sigmoid函数。
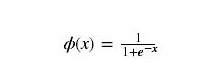

x是输入量,w是权重,b是偏移量(bias),权重w使得sigmoid函数可以调整其倾斜程度(上下),偏移量b不会改变曲线大体形状(左右)
小结:对比sigmoid类函数主要变化是&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 390
390

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









