







YOLOv8s-VisDrone:面向无人机视觉目标检测的高效模型
1. 概述
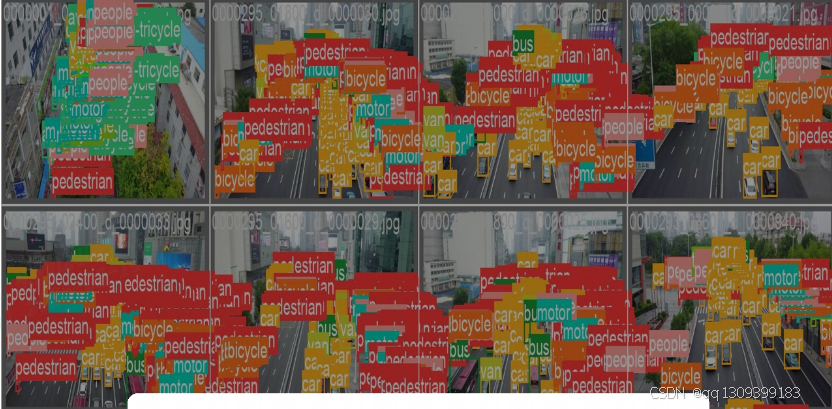
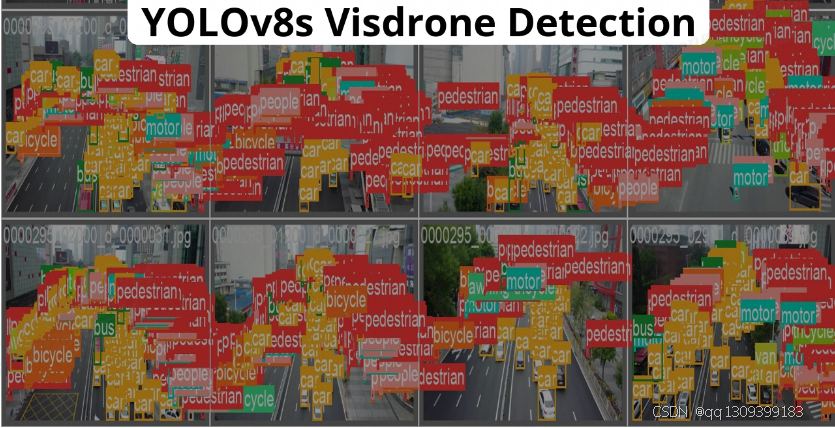
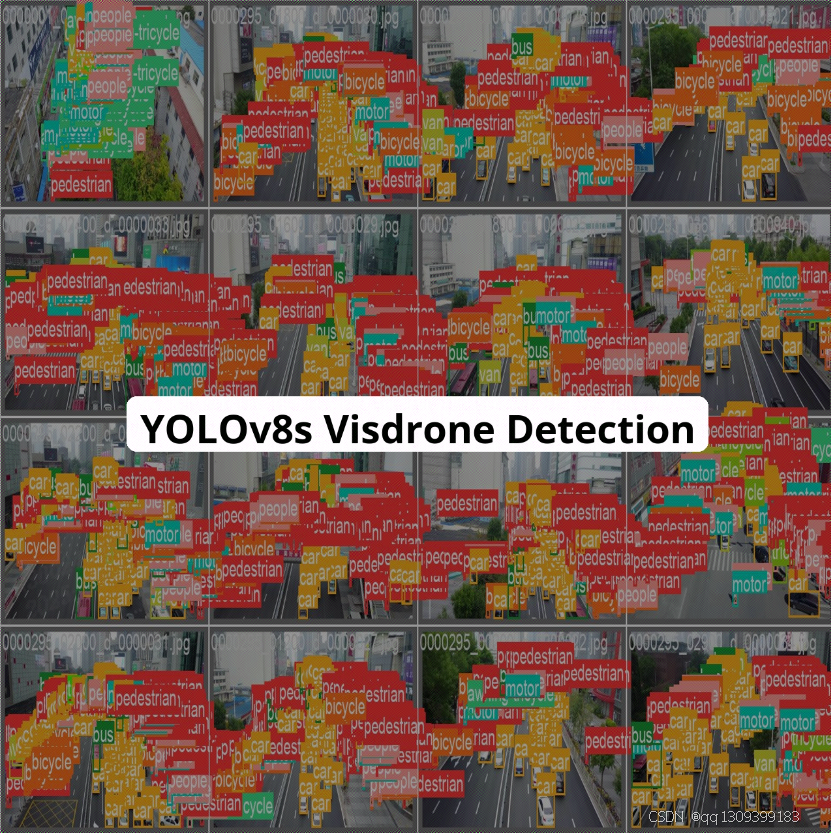
基于Ultralytics YOLOv8s模型针对VisDrone数据集优化的专用目标检测算法。VisDrone数据集是当前无人机视角下最具挑战性的目标检测基准之一,包含各种复杂场景下的目标,如小物体、密集遮挡和视角变化等。YOLOv8s作为YOLO系列的最新演进版本,通过深度优化在精度和速度间取得了卓越平衡,而针对VisDrone的专项优化使其在无人机应用场景中表现尤为突出。
2. 技术背景
2.1 YOLOv8架构创新
YOLOv8s是YOLOv8系列中的"small"版本,在保持较高精度的同时具有更小的模型尺寸和更快的推理速度。其核心创新包括:
- 改进的骨干网络:采用CSPDarknet53的增强版,优化了梯度流动
- 自适应特征融合:PANet结构的升级版实现更高效的多尺度特征融合
- 无锚点(Anchor-free)检测:简化了检测流程,提高了模型泛化能力
- 动态标签分配:Task-aligned Assigner提供更精确的正样本匹配
2.2 VisDrone数据集特点
VisDrone数据集包含:
- 10,209张高分辨率图像(2000×1500像素)
- 10个具有挑战性的类别:行人、汽车、自行车等
- 超过2.6百万个边界框标注
- 多种复杂场景:城市、乡村、高空、低空等
- 典型挑战:小目标(80%目标小于40×40像素)、密集遮挡、视角畸变
具体类别
['pedestrian', 'people', 'bicycle', 'car', 'van', 'truck', 'tricycle', 'awning-tricycle', 'bus', 'motor']
3. YOLOv8s-VisDrone关键技术
3.1 针对小目标的优化
- 高分辨率输入:将输入分辨率从640×640提升至1280×1280,显著改善小目标检测
- 增强特征金字塔:在原有PANet基础上增加额外的小目标检测层
- 上下文感知模块:引入注意力机制捕捉小目标的上下文信息
3.2 数据增强策略
- Mosaic增强:4图拼接增强小目标出现频率
- 小目标复制粘贴:人工增加小目标样本数量
- 视角变换:模拟无人机不同拍摄角度
3.3 训练优化
- 自适应学习率:针对不同阶段调整学习策略
- 类别平衡采样:解决VisDrone中类别不平衡问题
- 迁移学习:先在COCO等通用数据集预训练,再微调
4. 性能表现
在VisDrone2019测试集上的表现:
| 指标 | YOLOv8s-VisDrone | 原始YOLOv8s | 改进幅度 |
|---|---|---|---|
| AP@0.5 | 42.3% | 35.7% | +6.6% |
| AP@0.5:0.95 | 26.8% | 21.2% | +5.6% |
| 小目标AP | 18.9% | 12.4% | +6.5% |
| 推理速度(FPS) | 48 | 62 | -14 |
虽然推理速度有所下降,但在无人机应用场景中,检测精度尤其是小目标检测能力的提升更为关键。
5. 实际应用
YOLOv8s-VisDrone特别适合以下无人机应用场景:
- 城市监控:密集人群检测与计数
- 交通管理:车辆流量分析与违章检测
- 灾害救援:受灾人员搜索定位
- 农业监测:农作物健康状态分析
- 基础设施巡检:电力线路、管道等缺陷检测
6. 部署考量
- 边缘设备适配:支持TensorRT加速,可在NVIDIA Jetson等边缘设备运行
- 模型量化:提供INT8量化版本,进一步减小模型体积
- 多平台支持:兼容Python、C++等多种开发环境
7. 未来发展方向
- 轻量化改进:通过神经网络架构搜索(NAS)进一步优化模型效率
- 多模态融合:结合红外等传感器数据提升复杂环境下的检测能力
- 视频时序分析:利用帧间信息提高检测稳定性
- 自监督学习:减少对大规模标注数据的依赖
8. 结论
YOLOv8s-VisDrone通过针对无人机视角和小目标检测的专项优化,在VisDrone数据集上展现了显著的性能提升,为无人机视觉应用提供了高效可靠的解决方案。其平衡的精度-速度特性使其成为实际工程部署的理想选择,特别适合需要实时处理高分辨率无人机图像的各类应用场景。随着无人机技术的普及,此类专用目标检测算法将在智慧城市、精准农业、公共安全等领域发挥越来越重要的作用。


















 1202
1202

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









