







processScan函数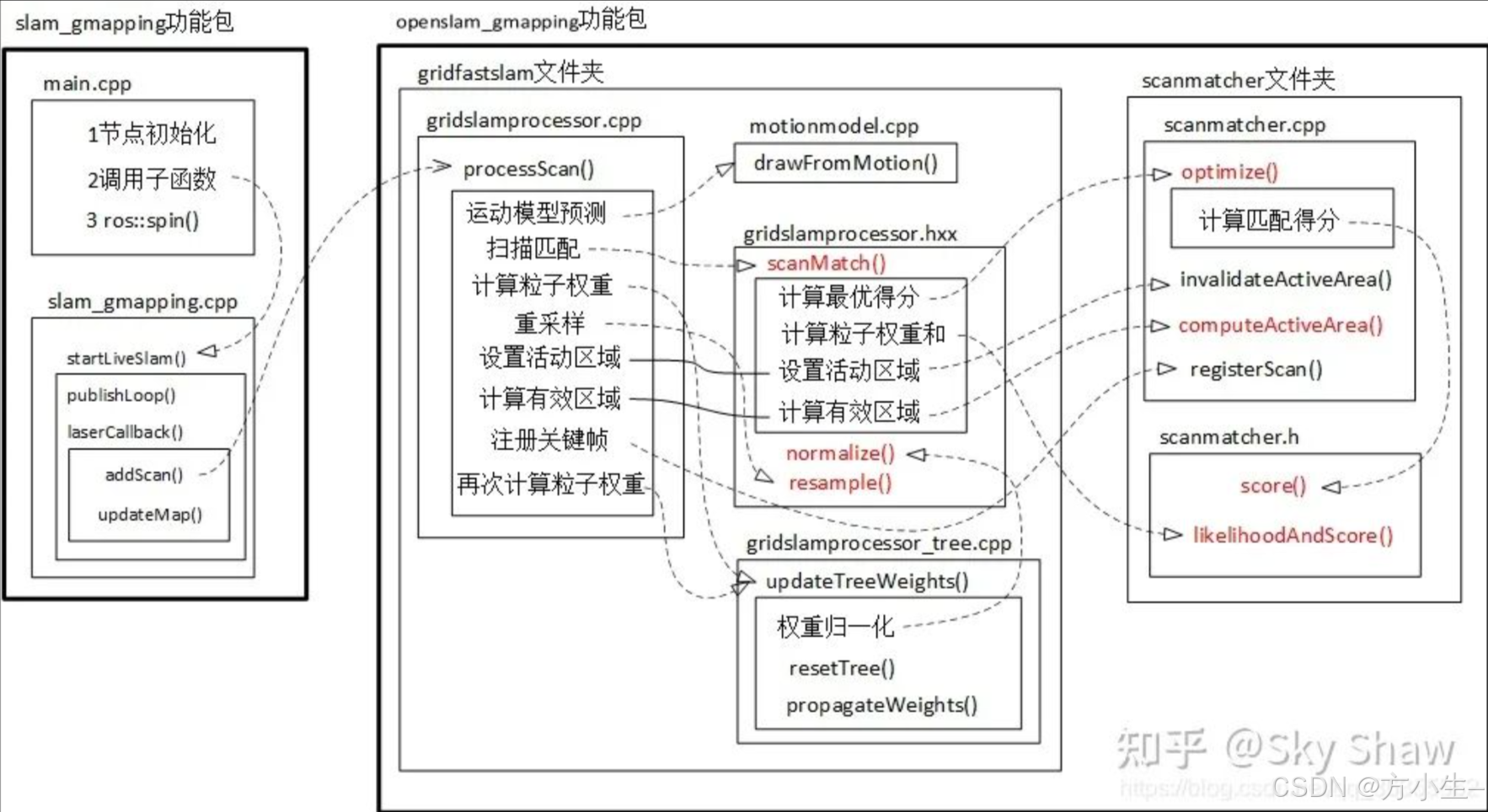
参考:https://blog.csdn.net/CV_Autobot/article/details/131058981

drawFromMotion:根据运动模型更新粒子位姿
scanMatch:进行扫描匹配
resample:重采样
逐步分解并详细解释代码
1. 获取当前扫描的相对位姿
OrientedPoint relPose = reading.getPose(); // 获取当前扫描的相对位姿
if (!m_count){
// 如果是第一次处理扫描
m_lastPartPose = m_odoPose = relPose; // 初始化上一次粒子位姿和里程计位姿
}
- 从
reading中获取当前扫描的相对位姿relPose。 - 如果是第一次处理扫描(
m_count为0),则初始化上一次粒子位姿m_lastPartPose和里程计位姿m_odoPose为relPose。
2. 使用运动模型更新所有粒子
for (ParticleVector::iterator it = m_particles.begin(); it != m_particles.end(); it++){
OrientedPoint& pose(it->pose);
pose = m_motionModel.drawFromMotion(it->pose, relPose, m_odoPose); // 根据运动模型更新粒子位姿
}
- 遍历所有粒子,使用运动模型
m_motionModel更新每个粒子的位姿。
3. 更新输出文件
if (m_outputStream.is_open()){
m_outputStream << setiosflags(ios::fixed) << setprecision(6);
m_outputStream << "ODOM ";
m_outputStream << setiosflags(ios::fixed) << setprecision(3) << m_odoPose.x << " " << m_odoPose.y << " ";
m_outputStream << setiosflags(ios::fixed) << setprecision(6) << m_odoPose.theta << " ";
m_outputStream << reading.getTime();
m_outputStream << endl;
}
if (m_outputStream.is_open()){
m_outputStream << setiosflags(ios::fixed) << setprecision(6);
m_outputStream << "ODO_UPDATE " << m_particles.size() << " ";
for (ParticleVector::iterator it = m_particles.begin(); it != m_particles.end(); it++){
OrientedPoint& pose(it->pose);
m_outputStream << setiosflags(ios::fixed) << setprecision(3) << pose.x << " " << pose.y << " ";
m_outputStream << setiosflags(ios::fixed) << setprecision(6) << pose.theta << " " << it-> weight << " ";
}
m_outputStream << reading.getTime();
m_outputStream << endl;
}
- 如果输出流
m_outputStream是打开的,则将里程计信息和粒子更新信息写入输出文件。
4. 调用回调函数
onOdometryUpdate();
- 调用里程计更新回调函数
onOdometryUpdate()。
5. 累积机器人的平移和旋转
OrientedPoint move = relPose - m_odoPose;
move.theta = atan2(sin(move.theta), cos(move.theta));
m_linearDistance += sqrt(move * move);
m_angularDistance += fabs(move.theta);
- 计算机器人从上一次里程计位姿到当前位姿的平移和旋转。
- 累积线性距离
m_linearDistance和角度距离m_angularDistance。
6. 检查机器人是否跳跃
if (m_linearDistance > m_distanceThresholdCheck){
cerr << "***********************************************************************" << endl;
cerr << "********** Error: m_distanceThresholdCheck overridden!!!! *************" << endl;
cerr << "m_distanceThresholdCheck=" << m_distanceThresholdCheck << endl;
cerr << "Old Odometry Pose= " << m_odoPose.x << " " << m_odoPose.y
<< " " << m_odoPose.theta << endl;
cerr << "New Odometry Pose (reported from observation)= " << relPose.x << " " << relPose.y
<< " " << relPose.theta << endl;
cerr << "***********************************************************************" << endl;
cerr << "** The Odometry has a big jump here. This is probably a bug in the **" << endl;
cerr << "** odometry/laser input. We continue now, but the result is probably **" << endl;
cerr << "** crap or can lead to a core dump since the map doesn't fit.... C&G **" << endl;
cerr << "***********************************************************************" << endl;
}
- 如果线性距离超过阈值
m_distanceThresholdCheck,则输出警告信息。
7. 更新里程计位姿
m_odoPose = relPose; // 更新里程计位姿
- 更新里程计位姿
m_odoPose为当前相对位姿relPose。
8. 处理扫描
bool processed = false;
if (!m_count
|| m_linearDistance > m_linearThresholdDistance
|| m_angularDistance > m_angularThresholdDistance){
if (m_outputStream.is_open()){
m_outputStream << setiosflags(ios::fixed) << setprecision(6);
m_outputStream << "FRAME " << m_readingCount;
m_outputStream << " " << m_linearDistance;
m_outputStream << " " << m_angularDistance << endl;
}
if (m_infoStream)
m_infoStream << "update frame " << m_readingCount << endl
<< "update ld=" << m_linearDistance << " ad=" << m_angularDistance << endl;
cerr << "Laser Pose= " << reading.getPose().x << " " << reading.getPose().y
<< " " << reading.getPose().theta << endl;
assert(reading.size() == m_beams);
double * plainReading = new double[m_beams];
for(unsigned int i = 0; i < m_beams; i++){
plainReading[i] = reading[i];
}
m_infoStream << "m_count " << m_count << endl;
if (m_count > 0){
scanMatch(plainReading); // 进行扫描匹配
if (m_outputStream.is_open()){
m_outputStream << "LASER_READING " << reading.size() << " ";
m_outputStream << setiosflags(ios::fixed) << setprecision(2);
for (RangeReading::const_iterator b = reading.begin(); b != reading.end(); b++){
m_outputStream << *b << " ";
}
OrientedPoint p = reading.getPose();
m_outputStream << setiosflags(ios::fixed) << setprecision(6);
m_outputStream << p.x << " " << p.y << " " << p.theta << " " << reading.getTime() << endl;
m_outputStream << "SM_UPDATE " << m_particles.size() << " ";
for (ParticleVector::const_iterator it = m_particles.begin(); it != m_particles.end(); it++){
const OrientedPoint& pose = it->pose;
m_outputStream << setiosflags(ios::fixed) << setprecision(3) << pose.x << " " << pose.y << " ";
m_outputStream << setiosflags(ios::fixed) << setprecision(6) << pose.theta << " " << it 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









