







 超级会员免费看
超级会员免费看
 本文介绍了ROS中的geometry_msgs/PoseStamped.h头文件及其在表示带有时间戳的位姿信息中的作用。同时,文章探讨了与geometry_msgs/PoseWithCovarianceStamped.h的区别,后者包含姿态不确定性信息。还讲解了如何使用python的tf库进行坐标转换,并提到了tf库与TensorFlow的关系。
本文介绍了ROS中的geometry_msgs/PoseStamped.h头文件及其在表示带有时间戳的位姿信息中的作用。同时,文章探讨了与geometry_msgs/PoseWithCovarianceStamped.h的区别,后者包含姿态不确定性信息。还讲解了如何使用python的tf库进行坐标转换,并提到了tf库与TensorFlow的关系。
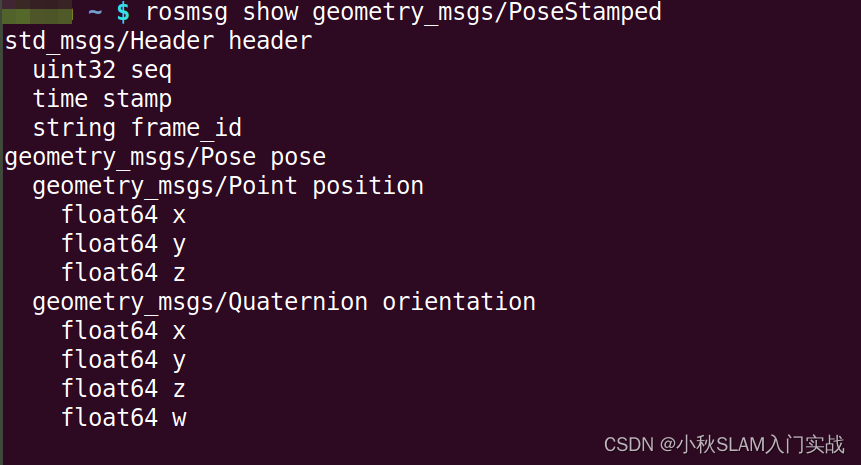
#include "geometry_msgs/PoseStamped.h" 是 ROS (Robot Operating System,机器人操作系统) 中的一个头文件。这个头文件定义了 geometry_msgs::PoseStamped 类型,它常被用来表示一个带有时间戳的位姿信息。
geometry_msgs::PoseStamped 是一个复合消息类型,它包含以下两部分:
-
std_msgs/Header header:这个头部信息包含了一个时间戳和一个坐标帧 ID。时间戳通常用于表示消息何时被创建或者数据何时被收集,坐标帧 ID 通常用于指示位姿数据是相对于哪个坐标帧的。 -
geometry_msgs/Pose pose:这个部分包含了位姿信息,即一个位置(geometry_msgs/Point position)和一个方向(geometry_msgs/Quaternion orientation)。geometry_msgs/Point包含了 x, y, z 三个字段&

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 536
536

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











