







 http://docs.ros.org/en/api/geometry_msgs/html/msg/PoseStamped.html
http://docs.ros.org/en/api/geometry_msgs/html/msg/PoseStamped.html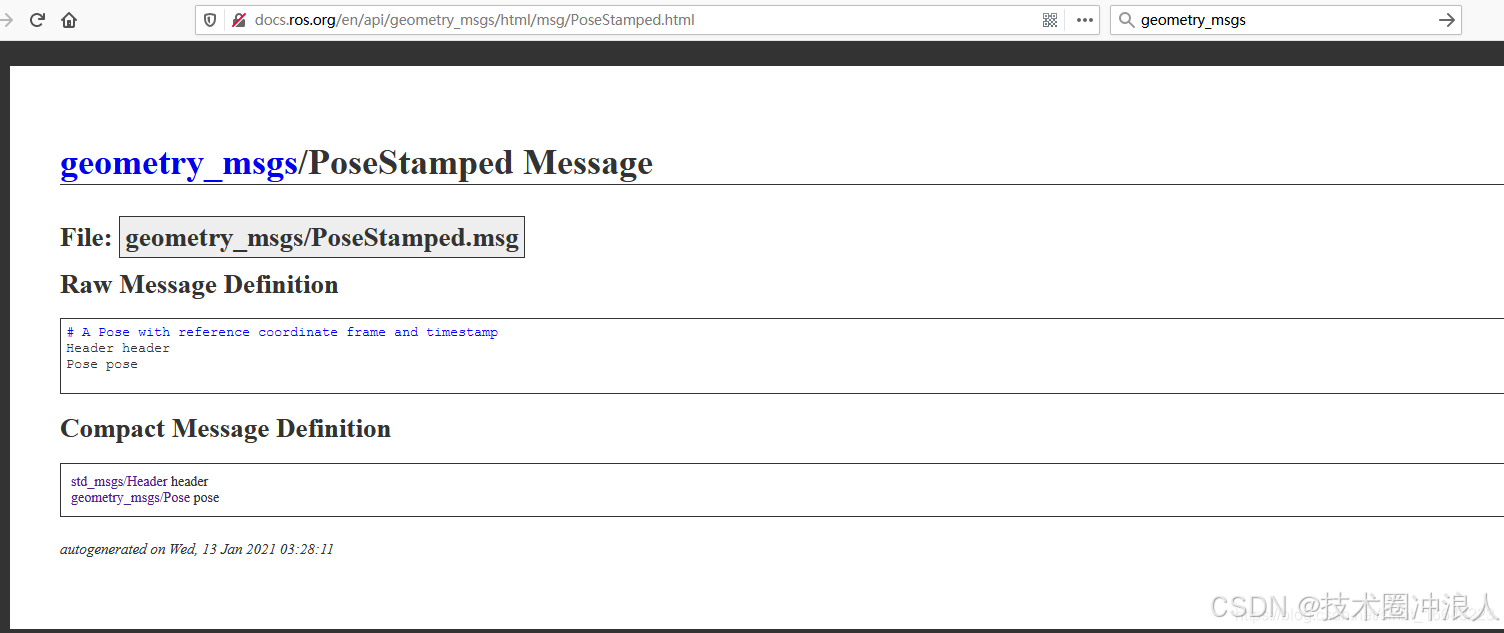
1、通过包含头文件可以调用该类型的消息
#include "geometry_msgs/PoseStamped.h"
2 、通过定义msg对象调用数据类型为std_msgs/Header,geometry_msgs/Pose的两个成员header, pose,即geometry_msgs::PoseStamped msg;msg.header、msg.pose。通过Compact Message Definition可以知道,我们通过std_msgs::Header msg_header创建了msg_header类型的对象,就可以通过msg_header.seq调用类型为unit32的成员seq进行赋值或者赋值给其他变量。
int n;
msgs_header.seq = 1;
'or'
n = msg_header.seq;
同理可以给msg_header.frame_id赋值string类型的变量
msg_header.stamp.sec得到从epoch开始的秒为单位的时间,msg_header.stamp.nsec得到从stamp_sec开始的纳秒时间
msgs_heder.stamp调用stamp,stamp.sec调用sec得到epoch的时间,那么msgs_header.stamp.sec就可以获取当前的时间,秒为单位
nsec的单位是纳秒,我们要乘以1e-9才能转换为秒,第二行得到的是时间以秒为单位.第四行得到的时间是以ns为单位.
常用形式:
#navpoint.msg
geometry_msgs/PoseStamped target_pose
uint8 floor
uint8 type
target_pose 的类型为geometry_msgs/PoseStamped
# A Pose with reference coordinate frame and timestamp
Header header
Pose pose
Record PoseStamped := { _header : Header.Header; _pose : Pose.Pose}.
简单构造
demo1
#构造header
target_pose.header.seq = 0;
target_pose.header.stamp =ros::Time::now();//如果有问题就使用Time(0)获取时间戳,确保类型一致
target_pose.header.frame_id = "map";
#构造pose
target_pose.pose.position.x = x1;
target_pose.pose.position.y = y1;
target_pose.pose.position.z = 0.0;
target_pose.pose.orientation.x = 0.0;
target_pose.pose.orientation.y = 0.0;
target_pose.pose.orientation.w = 1.0;
demo2
geometry_msgs::PoseStamped Start;
Start.header.seq = 0;
Start.header.stamp = ros::Time::now();//如果有问题就使用Time(0)获取时间戳,确保类型一致
Start.header.frame_id = "map";
Start.pose.position.x = x1;
Start.pose.position.y = y1;
Start.pose.position.z = 0.0;
Start.pose.orientation.x = 0.0;
Start.pose.orientation.y = 0.0;
Start.pose.orientation.w = 1.0;def publish_waypoints(self):
"""
Publish the ROS message containing the waypoints
"""
msg = Path()
msg.header.frame_id = "map"
msg.header.stamp = rospy.Time.now()
if self.current_route is not None:
for wp in self.current_route:
pose = PoseStamped()
pose.pose.position.x = wp[0].transform.location.x
pose.pose.position.y = -wp[0].transform.location.y
pose.pose.position.z = wp[0].transform.location.z
quaternion = tf.transformations.quaternion_from_euler(
0, 0, -math.radians(wp[0].transform.rotation.yaw))
pose.pose.orientation.x = quaternion[0]
pose.pose.orientation.y = quaternion[1]
pose.pose.orientation.z = quaternion[2]
pose.pose.orientation.w = quaternion[3]
msg.poses.append(pose)
self.waypoint_publisher.publish(msg)
rospy.loginfo("Published {} waypoints.".format(len(msg.poses))) 
















 2824
2824

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









