http://docs.ros.org/en/api/geometry_msgs/html/msg/PoseStamped.html https://blog.csdn.net/sinat_16643223/article/details/114542703 http://docs.ros.org/en/diamondback/api/geometry_msgs/html/PoseStamped_8h.html










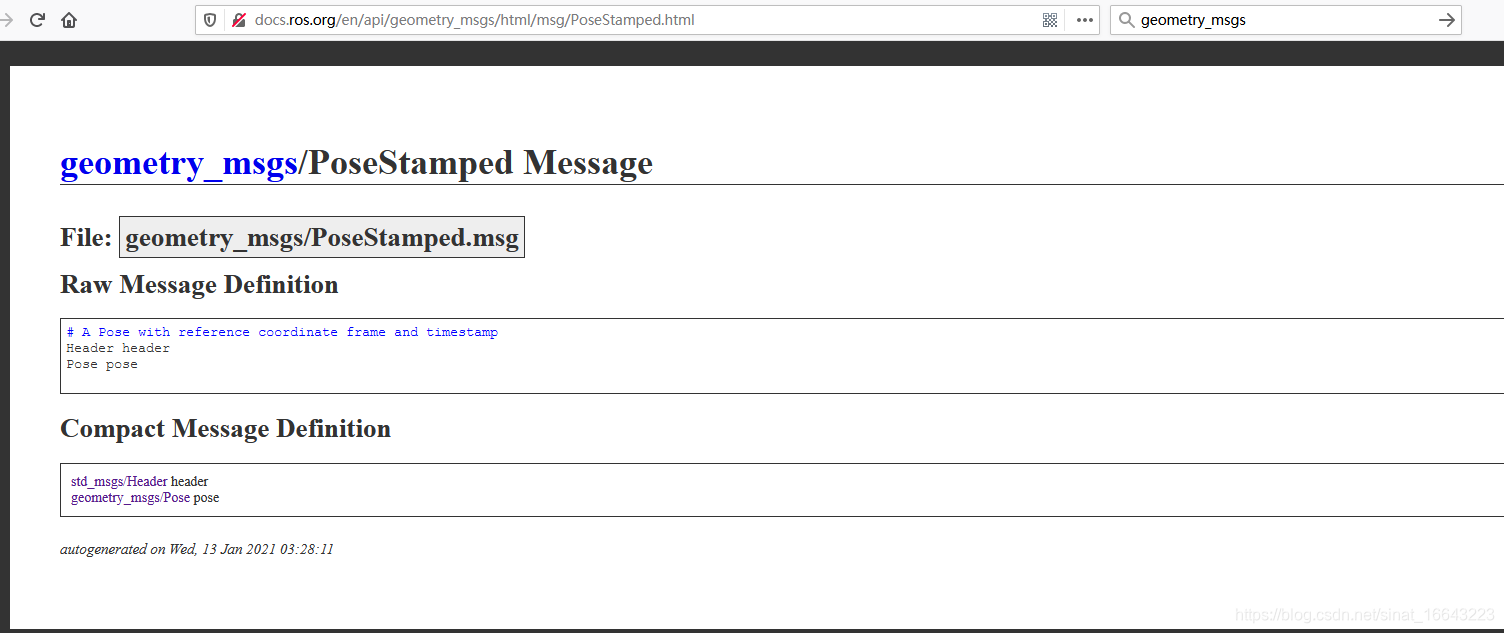
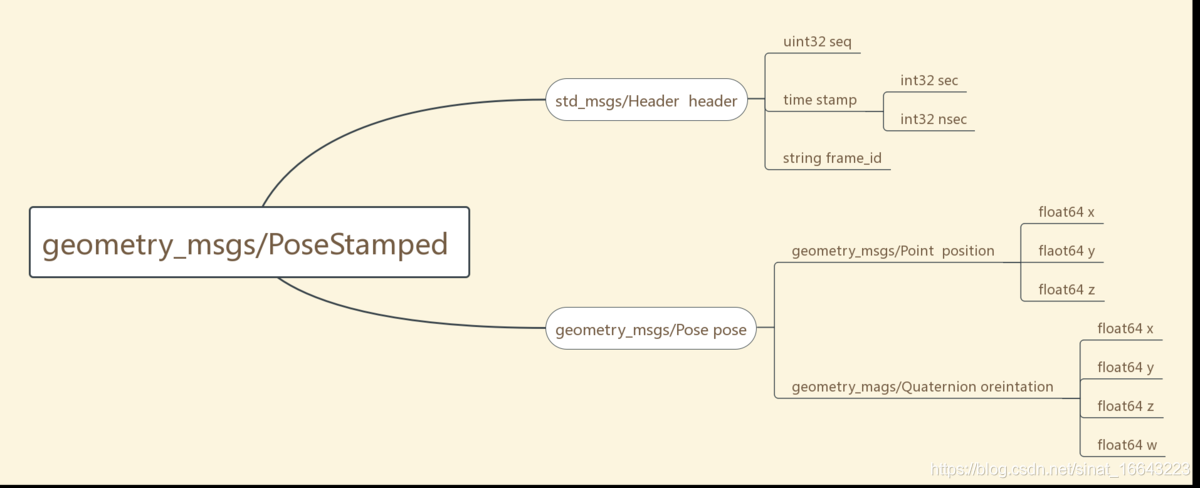
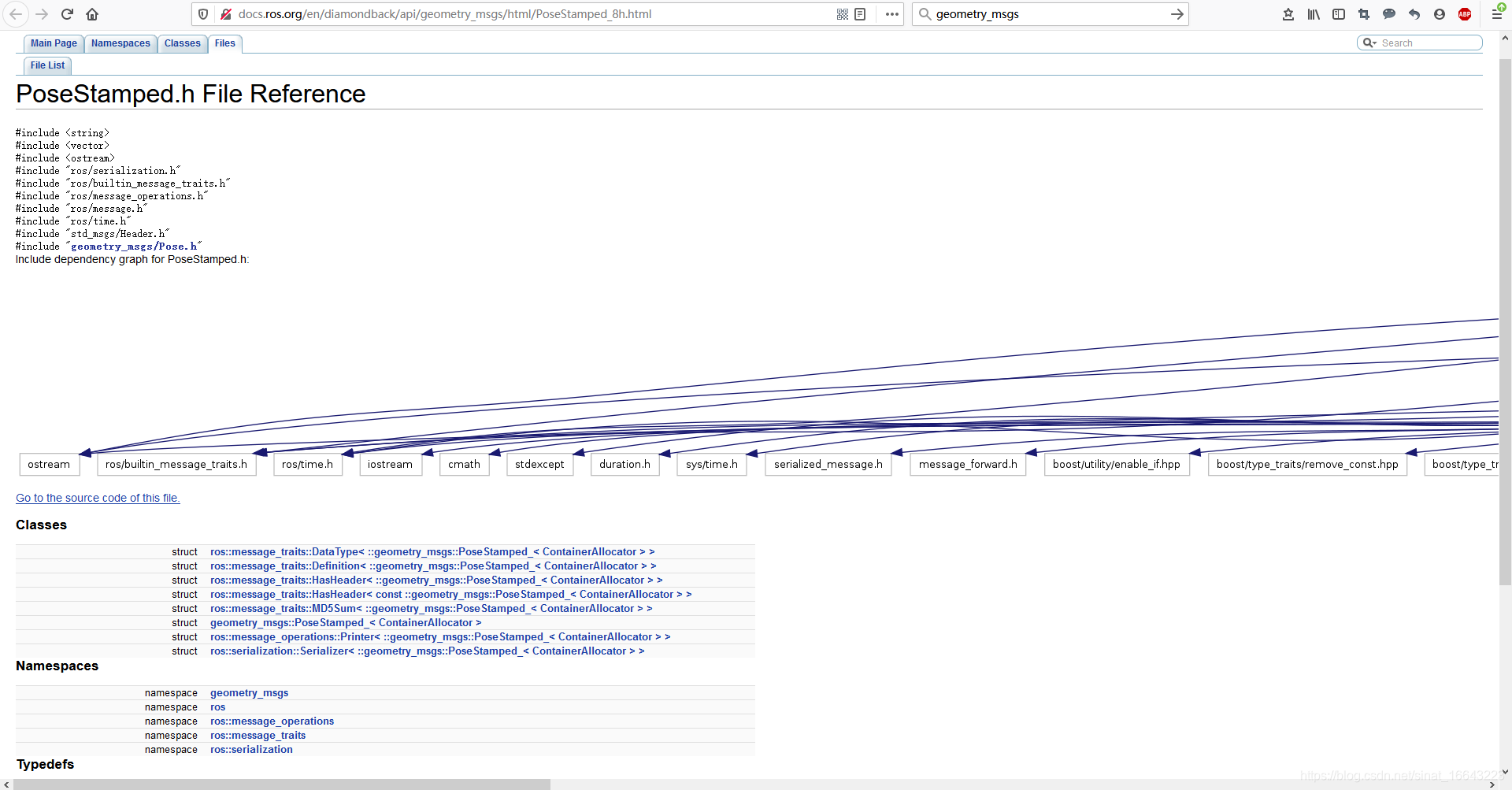
 本文详细介绍了 ROS (Robot Operating System) 中 PoseStamped 消息的结构和用途。PoseStamped 是 geometry_msgs 消息包中用于表示带时间戳的空间姿态和位置的数据类型,在机器人路径规划和定位等领域有着广泛的应用。
本文详细介绍了 ROS (Robot Operating System) 中 PoseStamped 消息的结构和用途。PoseStamped 是 geometry_msgs 消息包中用于表示带时间戳的空间姿态和位置的数据类型,在机器人路径规划和定位等领域有着广泛的应用。



















 2277
2277

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








