







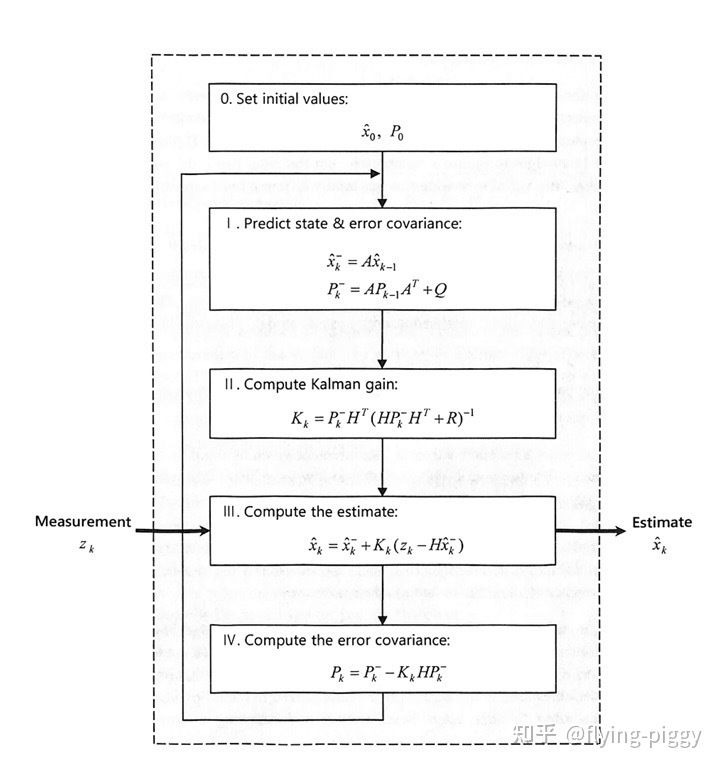
卡尔曼滤波器有一系列递推公式描述,提供一种高效可计算的方法来估计过程的状态,并使估计均方误差最小。它的应用广泛而强大,可以各级信号的过去和当前状态,甚至能估计将来的状态,即使是在无法得知模型的确切性质。
算法流程
直观理解
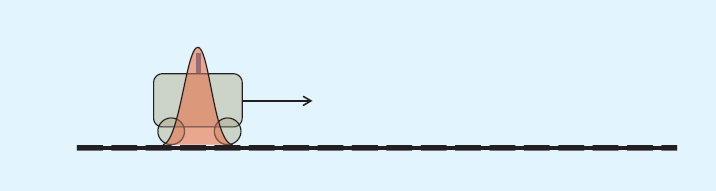
考虑一辆匀速运动的小车,它在时刻 t 的状态向量
x
(
t
)
x(t)
x(t) 与
x
(
t
−
1
)
x(t-1)
x(t−1) 有关,我们可以预测它的状态
x
(
t
)
=
A
x
(
t
−
1
)
x(t)=Ax(t-1)
x(t)=Ax(t−1) 。
然而,实际情况并不是那么理想。这个递推式会受到各种因素的影响(小车结构不稳,刮风下雨),变成
x
(
t
)
=
A
x
(
t
−
1
)
+
w
t
−
1
x(t)=Ax(t-1)+w_{t-1}
x(t)=Ax(t−1)+wt−1 ,
w
t
−
1
w_{t-1}
wt−1 为来自各种因素的噪声,我们假设它符合正态分布
N
(
0
,
Q
)
N(0,Q)
N(0,Q) ,为过程噪声。
“”我们尝试估计小车的位置:
t
=
0
t=0
t=0 时,小车位置 Pos 如下红色分布;
t
=
1
t=1
t=1 时,我们预测 Pos 值,递推过程中增加了一层噪声,不确定度变大了,方差增大;

为了避免单纯估计带来的偏差,我们对 Pos 进行雷达观测,当然,观测也会收到各种因素的影响,我们也假设它是一个符合正态分布
N
(
0
,
R
)
N(0,R)
N(0,R) 的量,称为观测噪声。测量结果显示,Pos 符合蓝色分布;
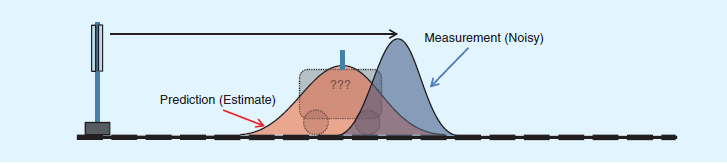
Kalman 通过使估计均方误差最小加权方式将红蓝分布合为绿色的正态分布(这使得 Kalman 滤波可以迭代计算):

该分布的具体推导有最大似然法、Ricatti 方程法以及对高斯密度函数变形的方法。
参考
https://zhuanlan.zhihu.com/p/495348963 卡尔曼滤波算法流程以及两个例子
https://www.zhihu.com/question/23971601/answer/46480923 EKF直观理解
















 990
990











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











