







 本文详述了使用新松机器人离线编程接口库控制机器人的步骤与常见问题解决方法,包括设置电脑与机器人IP、示教盒配置、创建与执行作业等关键环节。
本文详述了使用新松机器人离线编程接口库控制机器人的步骤与常见问题解决方法,包括设置电脑与机器人IP、示教盒配置、创建与执行作业等关键环节。

最近使用新松的离线编程接口库控制,通过向通过视觉引导机器人的动作,但是在这个过程中遇到了很多的问题,在此把细节步骤和可能遇到的疏忽记录一下。
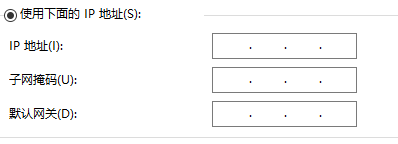
1、第一步要设置电脑ip。
机器人的ip是192.168.3.150,那就把电脑的ip设置为192.168.3.100,子网255.255.255.0,网关192.168.3.255。(以上为参考)。确保能够ping通。
2、设置新松机器人的示教盒配置 。
获取超级权限,将执行开关-离线使能置ON,,执行开关-安全门如果没连接硬件设备置OFF(默认),执行开关-轴运动置ON(默认)。
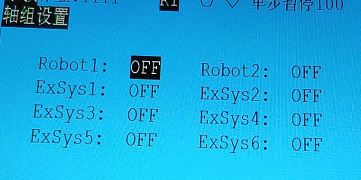
3、创建机器人作业
在示教器上新建一个作业,将轴组设置robot1置on(根据型号有所不同)。然后在作业中只加入一个指令:MUCRV,用于循环接收执行指令。将作业切到执行模式。之后把控制柜远程开关打到远程位置上。
4、在上位机发送指令进行控制
如果发送运动指令失败,可以在运行ReadOfflineVersion函数,读取一下机器人的版本号。
我的上位机作业执行顺序:
1、连接机器人
2、打开作业
3、读取版本号。
4、清空堆栈
5、外部上电
6、外部启动
7、愉快的开始我们的任务执行吧

















 613
613

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









