







Stereo R-CNN based 3D Object Detection for Autonomous Driving
文章目录
本文思想
通过充分利用立体图像中的稀疏、密集、语义和几何信息,提出了一种用于自动驾驶的称为立体声R-CNN的三维物体检测方法。它扩展了立体输入的快速R-CNN,以同时检测和关联左右图像中的对象。
在立体区域提议网络(RPN)之后添加额外的分支来预测稀疏的关键点、视点和对象尺寸,并结合二维左右框来计算粗略的三维对象边界框。然后,我们使用左右获取的ROI,通过基于区域的光度学对齐来恢复精确的3D边界框。
此方法不需要深度输入和三维位置监控,但是优于现有的所有基于全监控图像的方法。在具有挑战性的KITTI数据集上的实验表明,此方法在3D检测和3D定位任务上都比目前最先进的基于立体的方法有大约30%的AP。
贡献
(1)一种立体R-CNN方法,它同时检测和关联立体图像中的目标。
(2)一种利用关键点和立体盒约束的三维盒估计器。
(3)一种基于密集区域的光度学对准方法,可确保我们的三维物体定位精度。
(4)对KITTI数据集的评估表明,我们的性能优于所有最先进的基于图像的方法,甚至可以与基于激光雷达的方法相比。
网络架构图
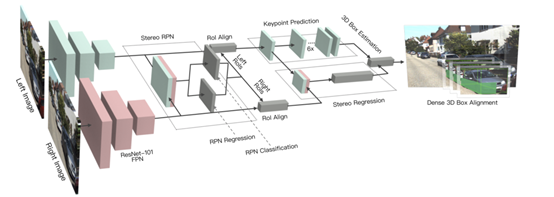
使用所提出的立体R-CNN同时检测和关联左、右图像中的目标,使用权重共享ResNet-101和FPN作为骨干网络来提取左右图像的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1704
1704











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









