







小白一枚,毕设突发奇想加入了ROS的内容,不知道自己还能不能毕业。以下均为通过看视频,翻博客等整理而成的笔记,并非我的原创。可能会出现一些报错的修改或者简单的代码是我自己做的。哈哈。
之前已经学会了通过URDF和Xacro文件,在RVIZ中创建机器人模型,接下来应该学习如何让机器人动起来了。这就要用到:Arbotix
Arbotix介绍:
- 是一款控制电机、舵机的控制板,并提供相应的 ros 功能包。
- 提供一个差速控制器,通过接受速度控制指令更新机器人的 joint 状态,实现机器人在 rviz 中的运动。
- 这个差速控制器在 arbotix_python 程序包中,完整的 arbotix 程序包还包括多种控制器,分别对应 dynamixel 电机、多关节机械臂以及不同形状的夹持器。
接下来,通过一个案例演示 arbotix 的使用。
需求描述:
控制机器人模型在 rviz 中做圆周运动
实现流程:
-
安装 Arbotix
-
创建新功能包,准备机器人 urdf、xacro 文件
-
添加 Arbotix 配置文件
-
编写 launch 文件配置 Arbotix
-
启动 launch 文件并控制机器人模型运动
1.安装 Arbotix
方式1:命令行调用
sudo apt-get install ros-<<VersionName()>>-arbotix
将 <<VsersionName()>> 替换成当前 ROS 版本名称
比如我是melodic版本:
sudo apt-get install ros-melodic-arbotix
如果提示功能包无法定位,请采用方式2。
方式2:源码安装
先从 github 下载源码,然后调用 catkin_make 编译
git clone https://github.com/vanadiumlabs/arbotix_ros.git
2.创建新功能包,准备机器人 urdf、xacro
urdf 和 xacro 调用上一讲实现即可
3.添加 arbotix 所需的配置文件
添加 arbotix 所需配置文件:在/DEMO05_WS/src/urdf01_rviz/config目录下新建control.yaml,文件内容如下:
# 该文件是控制器配置,一个机器人模型可能有多个控制器,比如: 底盘、机械臂、夹持器(机械手)....
# 因此,根 name 是 controller
controllers: {
# 单控制器设置
base_controller: {
#类型: 差速控制器
type: diff_controller,
#参考坐标
base_frame_id: base_footprint,
#两个轮子之间的间距
base_width: 0.2,
#控制频率
ticks_meter: 2000,
#PID控制参数,使机器人车轮快速达到预期速度
Kp: 12,
Kd: 12,
Ki: 0,
Ko: 50,
#加速限制
accel_limit: 1.0
}
}
另请参考: arbotix_python/diff_controller - ROS Wiki
4.launch 文件中配置 arbotix 节点
在/DEMO05_WS/src/urdf01_rviz/urdf/xacro目录下新建demo07_control.launch
launch 示例代码:
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam file="$(find my_urdf05_rviz)/config/hello.yaml" command="load" />
<param name="sim" value="true" />
</node>
代码解释:
<node> 调用了 arbotix_python 功能包下的 arbotix_driver 节点
<rosparam> arbotix 驱动机器人运行时,需要获取机器人信息,可以通过 file 加载配置文件
<param> 在仿真环境下,需要配置 sim 为 true
完整的launch 文件代码:
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find urdf01_rviz)/urdf/xacro/car.urdf.xacro" />
<node pkg="rviz" type="rviz" name="rviz" ns="car" args="-d $(find urdf01_rviz)/config/show_mycar.rviz" />
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" ns="car" output="screen" />
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" ns="car" output="screen" />
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" ns="car" output="screen" />
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam file="$(find urdf01_rviz)/config/control.yaml" command="load" />
<param name="sim" value="true" />
</node>
</launch>
5.启动 launch 文件并控制机器人模型运动
启动launch:roslaunch xxxx ....launch
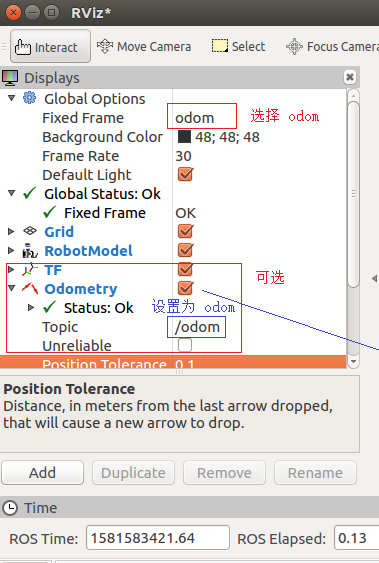
配置 rviz:
控制小车运动:
此时调用 rostopic list 会发现一个熟悉的话题: /cmd_vel
我们可以往这个话题上发布速度消息。

通过如下命令发布消息:
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
以上命令将线速度设置为0.2m/s,角速度设置为0.5rad/s
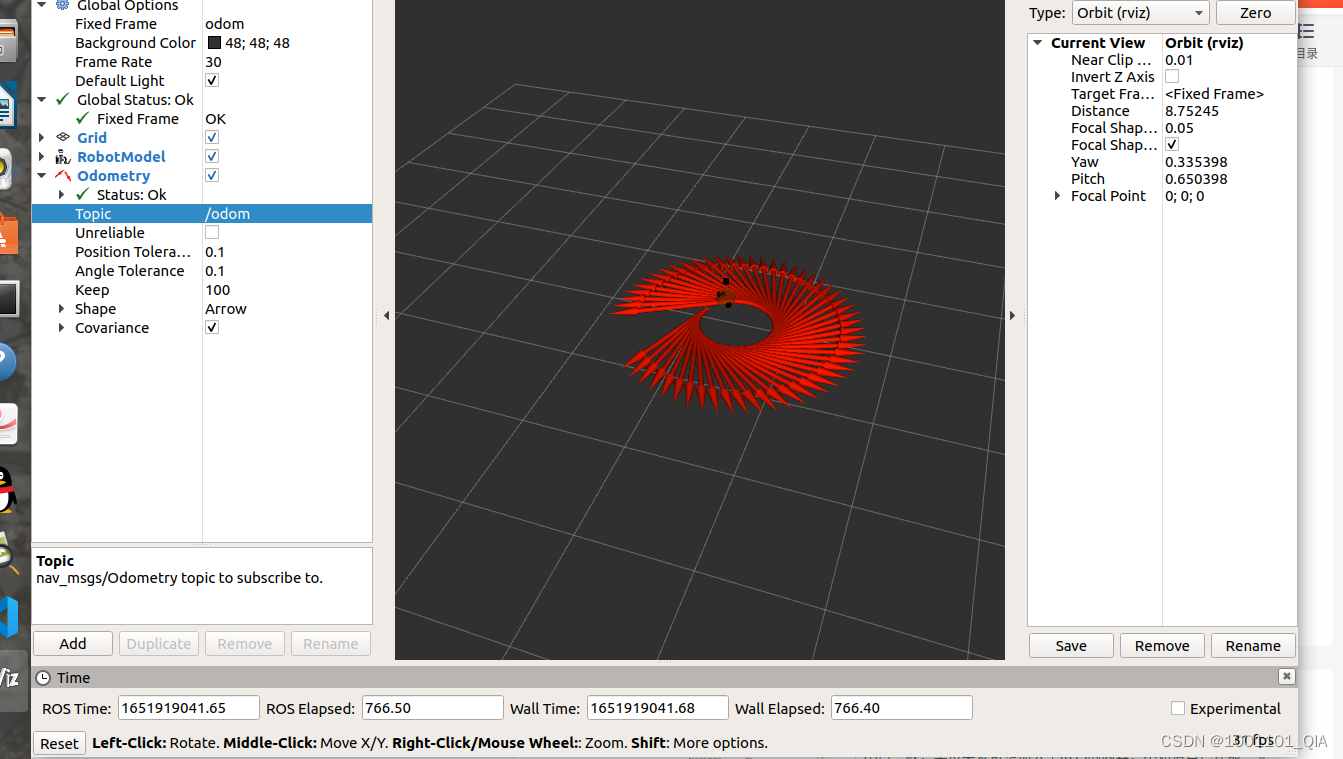
现在,rviz中的小车就可以做圆周运动了。
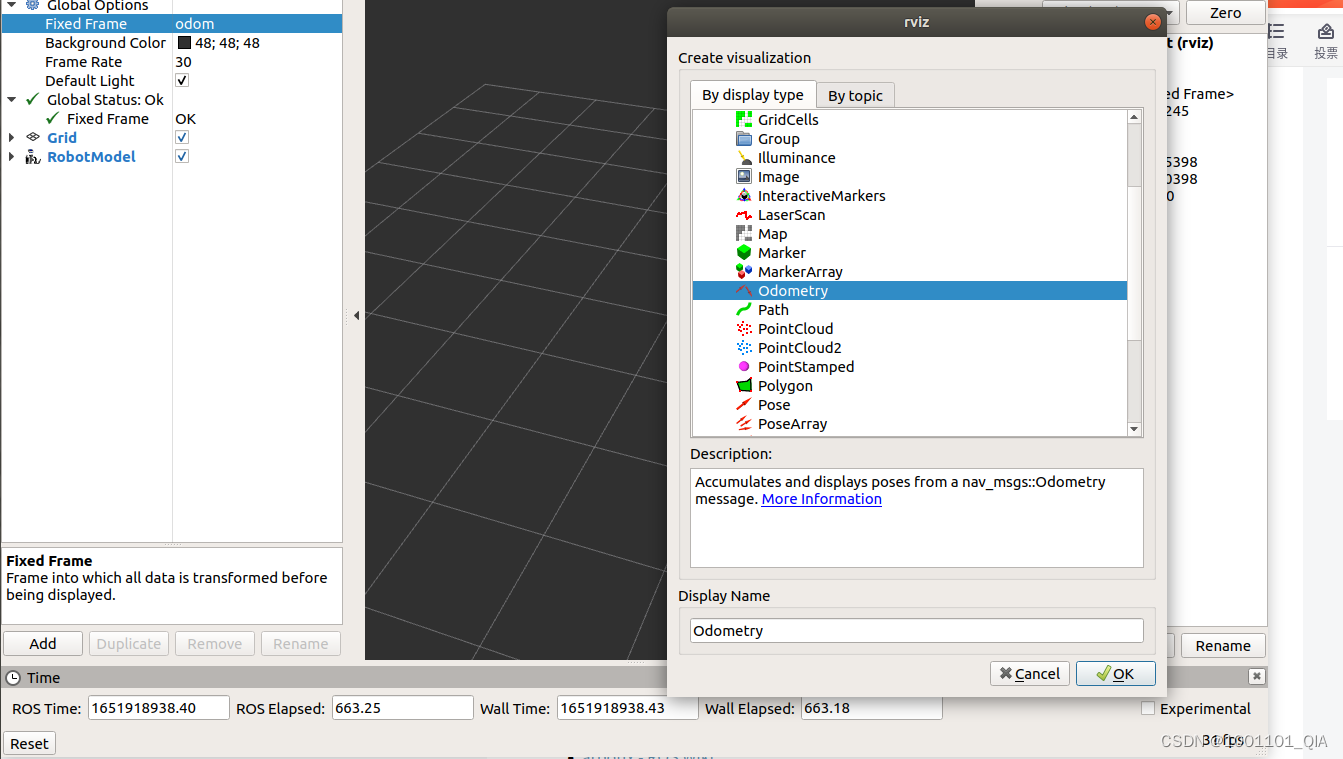
为了优化视觉体验,我们可以继续添加组件。
ADD-Odometry
展开Odometry,将topic改为odom,这时候会看到地图上出现箭头,箭头的指向就是小车的运动方向。
ADD-TF,添加TF组件

另请参考:














 1781
1781











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









