







点云的获取方式有多种,比如三维成像传感器、Lidar激光探测与测量、逆向工程等... 对于寻常百姓家,后2者的成本是十分昂贵的,所以我们可以尝试玩一下自己搭建三维成像传感器中的一种——3D线激光,一个单目相机,一个激光足矣。
对于3D线扫,要产生点云,首先需要对系统进行标定,这里我们需要获取到的信息有:
1.相机的内外参 2.激光的平面方程 3.移动方向的平移矩阵
在计算出这三步骤结果后,我们就可以通过每一张2D像素图片,计算出3D点的空间位置。
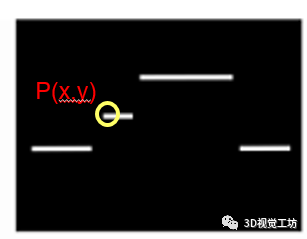
图像中每个点都可以得到一个像素坐标P(x,y),这个点是实际空间中的某个点,和相机中心点的连线在相机平面上的投影得到的。因此根据相机内外参的标定结果,我们可以得到相机的中心点C(Xc,Yc,Zc),以及这个像素坐标 $P$ 映射到的实际空间坐标P0(X0,Y0,Z0),这里的P0理论上应该是一组点,我们可以直接取Z0=0的点来方便计算。由这两个点组成的空间直线与激光平面的交点就是其三维空间中的点坐标。我们可以通过直线方程和激光平面方程联立解出该点的坐标。
1)直线方程:(x-Xc)/(x-X0) = (y-Yc)/(y-Y0) = (z-Zc)/(z-Z0)2)平面方程:Ax+By+Cz+D=0
在一张图片中的所有点都计算完毕后,再次计算下一张图片中的所有点。每张图片的计算结果都要根据移动方向的平移矩阵来进行叠加映射。
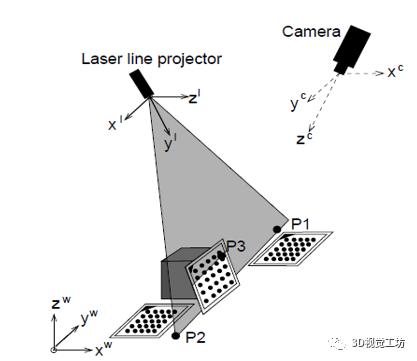
halcon有非常简单实用的线激光3D点云成像的相关例程,我们可以通过例程自己搭建平台进行3D相机的开发和测试,那就是halcon的例程calibrate_sheet_of_line_calplate.hdev,这个例程就是对自己用线激光和相机搭建的3D平台进行参数标定。
整个例程的步骤非常明确,每一步在halcon的例程中都有配文字说明,但是有些细节和关键参数需要了解透彻,这样才能方便我们在搭建自己的系统时可以替换和改变关键的参数。下面我们来详细解析这个例程:
* Part 1: Perform the calibration of the camera
首先第一步,对相机参数的标定,实际上是外参的标定
gen_cam_par_area_scan_polynomial  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2372
2372











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









