







这里记录下ROS开发,工作空间创建和功能包创建
1 工作空间创建
ROS工作空间顾名思义,就是ROS开发过程中的工作目录
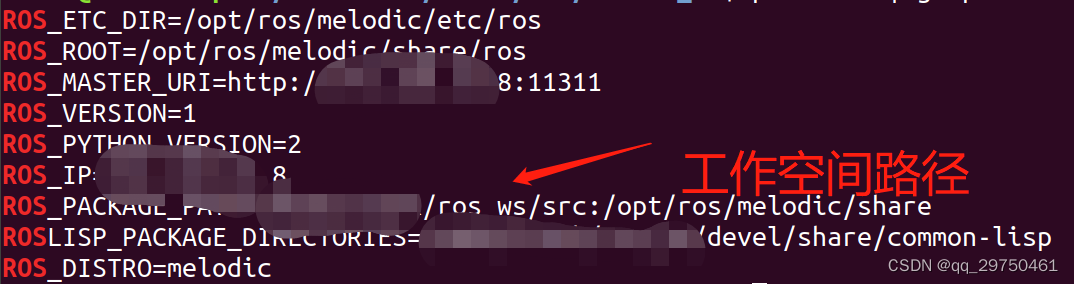
即在终端使用 printenv | grep ROS 命令,里面的 ROS_PACKAGE_PATH
1.1 创建新的工作目录
mkdir -p /你的路径/ros_ws/src //注意这里的src 一定要创建不然,后来的编译不通过
cd /你的路径/ros_ws // 切换至ros_ws
catkin_make //编译创建 ROS 开发完整目录

可以看一下devel文件夹种的内容

1.2 配置环境变量,使创建好的目录加载进ROS_PACKAGE_PATH,有两种测率,一种是临时添加至系统环境,一种是永久添加
策略1 临时将工作空间添加环境
source devel/setup.sh
printenv | grep ROS
 出现上图即说明成功,不过,当我们关闭终端,重新打开,再次输入 printenv | grep ROS时,就会发现新建的工作空间不在 ROS_PACKAGE_PATH 中,这个时候可以使用策略2进行使能环境。
出现上图即说明成功,不过,当我们关闭终端,重新打开,再次输入 printenv | grep ROS时,就会发现新建的工作空间不在 ROS_PACKAGE_PATH 中,这个时候可以使用策略2进行使能环境。
策略2 永久激活环境
vi ./bashrc // 进入环境配置目录
//添加
source /你的路径/ros_ws/devel/setup.bash

关闭终端,重新打开终端,输入
printenv | grep ROS //可发现工作空间顺利加载入环境中
















 1818
1818











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









