









本文记录日志相关的函数,主要记录下测试代码
ROS中的日志等级与其他编程语言类似,主要包含:
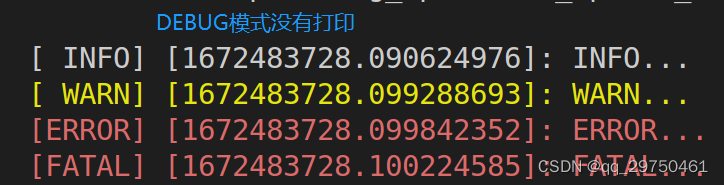
1 DEBUG(调试):只在调试时使用,此类消息不会输出到控制台;
2 INFO(信息):标准消息,一般用于说明系统内正在执行的操作;
3 WARN(警告):提醒一些异常情况,但程序仍然可以执行;
4 ERROR(错误):提示错误信息,此类错误会影响程序运行;
5 FATAL(严重错误):此类错误将阻止节点继续运行。
C++代码
#include "ros/ros.h"
int main(int argc,char *argv[]){
ros::init(argc,argv,"test_04_log");
ros::NodeHandle nh;
//仅在调试时间打印,正常不打印
ROS_DEBUG("DEBUG...");
ROS_INFO("INFO...");
ROS_WARN("WARN...");
ROS_ERROR("ERROR...");
ROS_FATAL("FATAL...");
return 0;
}
配置CMakeLists.txt 和编译之后,运行的过程如下:















 2055
2055











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









