







前言
LIO-SAM的全称是:Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping
从全称上可以看出,该算法是一个紧耦合的雷达惯导里程计(Tightly-coupled Lidar Inertial Odometry),借助的手段就是利用GT-SAM库中的方法。
LIO-SAM 提出了一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架。
实现了高精度、实时的移动机器人的轨迹估计和建图。
其中建图优化节点整体如下图
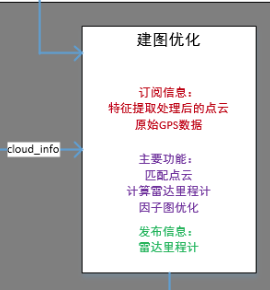
在之前的博客中,我们分部完成了
- 帧间点云匹配
- 回环检测及位姿计算
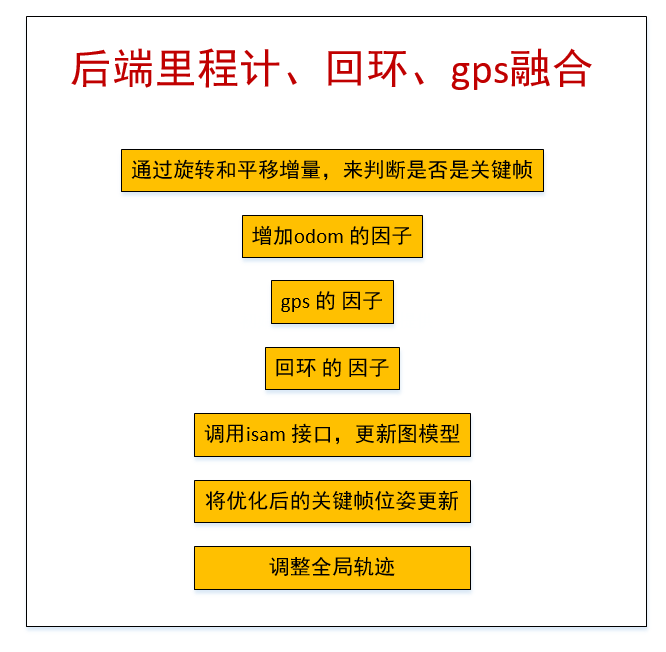
本篇我们来看在lio-sam框架中,是如何将三者(雷达里程计、回环检测、gps)进行融合,来实现全局位姿优化的。
代码解析
void saveKeyFramesAndFactor()
{
保存关键帧 添加 factor
if (saveFrame() == false)
return;
通过旋转和平移增量,判断是否是关键帧
如果不是关键帧则不往因子图里加factor
来看saveFrame()函数
bool saveFrame()
{
if (cloudKeyPoses3D->points.empty())
return true;
如果没有关键帧,就直接认为是关键帧
Eigen::Affine3f transStart = pclPointToAffine3f(cloudKeyPoses6D->back());
取出上一个关键帧的位姿
Eigen::Affine3f transFinal = pcl::getTransformation(transformTobeMapped[3], transformTobeMapped[4], transformTobeMapped[5],
transformTobeMapped[0], transformTobeMapped[1], transformTobeMapped[2]);
当前帧的位姿转成eigen形式
Eigen::Affine3f transBetween = transStart.inverse() * transFinal;
计算两个位姿之间的 delta pose
float x, y, z, roll, pitch, yaw;
pcl::getTranslationAndEulerAngles(transBetween, x, y, z, roll, pitch, yaw);
转成 平移 + 旋转(欧拉角) 的形式
if (abs(roll) < surroundingkeyframeAddingAngleThreshold &&
abs(pitch) < surroundingkeyframeAddingAngleThreshold &&
abs(yaw) < surroundingkeyframeAddingAngleThreshold &&
sqrt(x*x + y*y + z*z) < surroundingkeyframeAddingDistThreshold)
return false;
return true;
任何一个旋转大于给定阈值或者平移大于给定阈值就认为是关键帧
阈值的设置在 params.yaml 文件中

角度阈值 是 0.2 弧度
平移阈值 是 1 米
添加激光雷达帧间里程计因子
回到 saveKeyFramesAndFactor 函数中
如果是关键帧的话就给isam增加因子
addOdomFactor();
增加odom 的因子
来看具体内容
void addOdomFactor()
{
if (cloudKeyPoses3D->points.empty())
{
如果是第一帧 关键帧
noiseModel::Diagonal::shared_ptr priorNoise = noiseModel::Diagonal::Variances((Vector(6) << 1e-2, 1e-2, M_PI*M_PI, 1e8, 1e8, 1e8).finished());
置信度就设置差一点,尤其是不可观的平移和yaw角
gtSAMgraph.add(PriorFactor<Pose3>(0, trans2gtsamPose(transformTobeMapped), priorNoise));
增加先验约束 , 对第 0 个节点增加约束
initialEstimate.insert(0, trans2gtsamPose(transformTobeMapped));
加入节点信息 初始值
}else{
如果不是第一帧,就增加帧间约束
noiseModel::Diagonal::shared_ptr odometryNoise = noiseModel::Diagonal::Variances((Vector(6) << 1e-6, 1e-6, 1e-6, 1e-4, 1e-4, 1e-4).finished());
这时帧间约束置信度就设置高一些
gtsam::Pose3 poseFrom = pclPointTogtsamPose3(cloudKeyPoses6D->points.back());
上一关键帧 位姿 转成 gtsam的 格式
gtsam::Pose3 poseTo = trans2gtsamPose(transformTobeMapped);
当前关键帧 位姿 转成 gtsam的 格式
gtSAMgraph.add(BetweenFactor<Pose3>(cloudKeyPoses3D->size()-1, cloudKeyPoses3D->size(), poseFrom.between(poseTo), odometryNoise));
这是 一个 帧间 约束 ,分别 输入两个 节点 的 id,帧间约束大小 以及 置信度
initialEstimate.insert(cloudKeyPoses3D->size(), poseTo);
加入节点信息 先验位姿
添加GPS因子
回到 saveKeyFramesAndFactor 函数中
addGPSFactor();
gps 的 因子
void addGPSFactor()
{
if (gpsQueue.empty())
return;
如果没有gps信息就算了
if (cloudKeyPoses3D->points.empty())
return;
如果有gps但是没有关键帧信息也算了
因为gps 是给关键帧提供约束的
else
{
if (pointDistance(cloudKeyPoses3D->front(), cloudKeyPoses3D->back()) < 5.0)
return;
}
第一个关键帧和最后一个关键帧相差很近,也就算了,要么刚起步,要么会触发回环
if (poseCovariance(3,3) < poseCovThreshold && poseCovariance(4,4) < poseCovThreshold)
return;
gtsam 反馈的 当前 x、y 的置信度,如果置信度比较高 也不需要 gps来进行 优化
while (!gpsQueue.empty())
{
if (gpsQueue.front().header.stamp.toSec() < timeLaserInfoCur - 0.2)
{
gpsQueue.pop_front();
}
把距离当前帧比较早的帧都抛弃
else if (gpsQueue.front().header.stamp.toSec() > timeLaserInfoCur + 0.2)
{
break;
}` float noise_x = thisGPS.pose.covariance[0];
float noise_y = thisGPS.pose.covariance[7];
float noise_z = thisGPS.pose.covariance[14];
// 如果gps的置信度也不高,也没有必要使用了
if (noise_x > gpsCovThreshold || noise_y > gpsCovThreshold)
continue;`
比较晚就索性再等等lidar计算
{
// 寿命这个gps 时间上距离当前帧已经比较近了,那就把这个数据取出来
nav_msgs::Odometry thisGPS = gpsQueue.front();
gpsQueue.pop_front();
说明这个gps 时间上距离当前帧已经比较近了,那就把这个数据取出来
float noise_x = thisGPS.pose.covariance[0];
float noise_y = thisGPS.pose.covariance[7];
float noise_z = thisGPS.pose.covariance[14];
if (noise_x > gpsCovThreshold || noise_y > gpsCovThreshold)
continue;
如果gps的置信度也不高,也没有必要使用了
float gps_x = thisGPS.pose.pose.position.x;
float gps_y = thisGPS.pose.pose.position.y;
float gps_z = thisGPS.pose.pose.position.z;
取出gps 的 位置
if (!useGpsElevation)
{
gps_z = transformTobeMapped[5];
noise_z = 0.01;
}
通常gps 的z 没有 x y准,因此这里可以不使用z值 useGpsElevation 默认为0
直接拿里程计的z 并 设置 高置信度
if (abs(gps_x) < 1e-6 && abs(gps_y) < 1e-6)
continue;
如果gps 的 x 或者 y 太小,说明还没有初始化好
PointType curGPSPoint;
curGPSPoint.x = gps_x;
curGPSPoint.y = gps_y;
curGPSPoint.z = gps_z;
if (pointDistance(curGPSPoint, lastGPSPoint) < 5.0)
continue;
else
lastGPSPoint = curGPSPoint;
加入gps观测不宜太频繁,相邻不能超过5m
gtsam::Vector Vector3(3);
Vector3 << max(noise_x, 1.0f), max(noise_y, 1.0f), max(noise_z, 1.0f);
gps 的 置信度,标准差设置成最小1m,也就是不会特别信任gps信息
noiseModel::Diagonal::shared_ptr gps_noise = noiseModel::Diagonal::Variances(Vector3);
设置节点 置信度
gtsam::GPSFactor gps_factor(cloudKeyPoses3D->size(), gtsam::Point3(gps_x, gps_y, gps_z), gps_noise);
gtSAMgraph.add(gps_factor);
调用gtsam 中集成的gps 约束
aLoopIsClosed = true;
break;
加入gps 之后 等同于回环,需要触发较多的isam update
添加回环检测因子
回到 saveKeyFramesAndFactor 函数中
void addLoopFactor()
{
if (loopIndexQueue.empty())
return;
有一个专门的回环检测线程会检测回环,检测到就会给这个队列塞入回环约束
for (int i = 0; i < (int)loopIndexQueue.size(); ++i)
把队列里面所有的回环约束添加进行
int indexFrom = loopIndexQueue[i].first;//当前帧
int indexTo = loopIndexQueue[i].second;// 回环帧
当前帧 回环帧 索引
gtsam::Pose3 poseBetween = loopPoseQueue[i];
帧间约束
gtsam::noiseModel::Diagonal::shared_ptr noiseBetween = loopNoiseQueue[i];
回环的置信度就是icp的得分
gtSAMgraph.add(BetweenFactor<Pose3>(indexFrom, indexTo, poseBetween, noiseBetween));
加入约束
loopIndexQueue.clear();
loopPoseQueue.clear();
loopNoiseQueue.clear();
清空回环相关队列
aLoopIsClosed = true;
}
标志位 至 true
isam 更新
回到 saveKeyFramesAndFactor 函数中
isam->update(gtSAMgraph, initialEstimate);
isam->update();
所有因子加完了,就调用isam 接口,更新图模型
if (aLoopIsClosed == true)
{
isam->update();
isam->update();
isam->update();
isam->update();
isam->update();
}
如果加入了gps约束或者回环约束,isam需要进行更多次的优化
gtSAMgraph.resize(0);
initialEstimate.clear();
将约束和节点信息清空,他们已经呗加入到isam中去了,因此这里清空不会影响整个优化
isamCurrentEstimate = isam->calculateEstimate();
通过接口获得所以变量的状态
latestEstimate = isamCurrentEstimate.at<Pose3>(isamCurrentEstimate.size()-1);
取出优化后的最新关键帧位姿
thisPose3D.x = latestEstimate.translation().x();
thisPose3D.y = latestEstimate.translation().y();
thisPose3D.z = latestEstimate.translation().z();
thisPose3D.intensity = cloudKeyPoses3D->size();
cloudKeyPoses3D->push_back(thisPose3D);
平移信息取出来保存进clouKeyPoses 3D这个结构中,其中索引作为 intensity
thisPose6D.x = thisPose3D.x;
thisPose6D.y = thisPose3D.y;
thisPose6D.z = thisPose3D.z;
thisPose6D.intensity = thisPose3D.intensity ;
thisPose6D.roll = latestEstimate.rotation().roll();
thisPose6D.pitch = latestEstimate.rotation().pitch();
thisPose6D.yaw = latestEstimate.rotation().yaw();
thisPose6D.time = timeLaserInfoCur;
cloudKeyPoses6D->push_back(thisPose6D);
6D姿态同样保留下来
poseCovariance = isam->marginalCovariance(isamCurrentEstimate.size()-1);
保存当前位姿的置信度 用于是否使用gps的判断
transformTobeMapped[0] = latestEstimate.rotation().roll();
transformTobeMapped[1] = latestEstimate.rotation().pitch();
transformTobeMapped[2] = latestEstimate.rotation().yaw();
transformTobeMapped[3] = latestEstimate.translation().x();
transformTobeMapped[4] = latestEstimate.translation().y();
transformTobeMapped[5] = latestEstimate.translation().z();
将优化后的位姿更新到transformTobeMapped数组中,作为当前最佳估计值
pcl::copyPointCloud(*laserCloudCornerLastDS, *thisCornerKeyFrame);
pcl::copyPointCloud(*laserCloudSurfLastDS, *thisSurfKeyFrame);
当前帧的点云的角点和面点 分别拷贝一下
cornerCloudKeyFrames.push_back(thisCornerKeyFrame);
surfCloudKeyFrames.push_back(thisSurfKeyFrame);
关键帧的点云保存下来
updatePath(thisPose6D);
根据当前最新位姿更新rviz可视化
调整全局轨迹
下面来看调整全局轨迹
void correctPoses()
{
if (cloudKeyPoses3D->points.empty())
return;
没有关键帧,自然也没有什么意义
if (aLoopIsClosed == true)
{
只有回环以及gps信息这些会触发全局调整信息才会触发
laserCloudMapContainer.clear();
很多位姿会变化,因子之前的容器内转到世界坐标系下的很多点云就需要调整,因此这里索性清空
laserCloudMapContainer 这里存放关键帧的位姿和点云
globalPath.poses.clear();
清空path
int numPoses = isamCurrentEstimate.size();
for (int i = 0; i < numPoses; ++i)
{
// 更新所有关键帧的位姿
cloudKeyPoses3D->points[i].x = isamCurrentEstimate.at<Pose3>(i).translation().x();
cloudKeyPoses3D->points[i].y = isamCurrentEstimate.at<Pose3>(i).translation().y();
cloudKeyPoses3D->points[i].z = isamCurrentEstimate.at<Pose3>(i).translation().z();
cloudKeyPoses6D->points[i].x = cloudKeyPoses3D->points[i].x;
cloudKeyPoses6D->points[i].y = cloudKeyPoses3D->points[i].y;
cloudKeyPoses6D->points[i].z = cloudKeyPoses3D->points[i].z;
cloudKeyPoses6D->points[i].roll = isamCurrentEstimate.at<Pose3>(i).rotation().roll();
cloudKeyPoses6D->points[i].pitch = isamCurrentEstimate.at<Pose3>(i).rotation().pitch();
cloudKeyPoses6D->points[i].yaw = isamCurrentEstimate.at<Pose3>(i).rotation().yaw();
// 同时更新path
updatePath(cloudKeyPoses6D->points[i]);
}
然后更新所有的位姿
aLoopIsClosed = false;
}
标志位 至 0
总结



















 442
442

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











