







0. 预备知识(别跳过呀)
上一篇我们讲了正运动学,也就是通过齐次变换矩阵,知晓关节角后求得机械臂末端的位姿,并表示在基座标系下。这一篇我们就来讲一讲逆运动学问题——已知工具坐标系{T}相对于固定坐标系{S}的期望位姿,如何计算一系列满足期望要求的关节角?
0.1 求解的难度
这是一个难度更大的问题,因为求解操作臂运动学方程是一个非线性问题。譬如六自由度的机械臂Puma560,回顾最后求得的运动学方程,
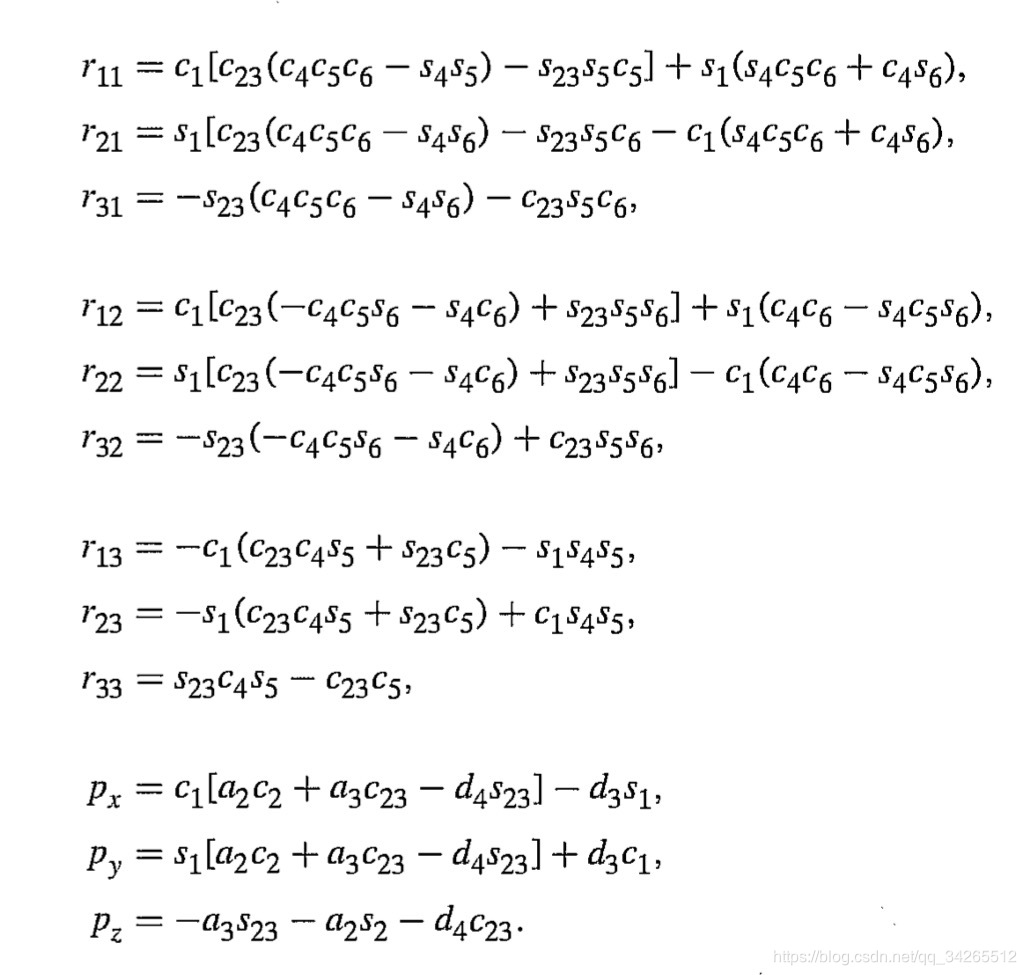
这里我们一共有12个方程,6个未知数。旋转部分3×3的矩阵由于每一列都是单位矢量,两两正交,因此这9个方程只有3个是独立的。再加上第四列前三行位置矢量的三个方程,6个方程对应6个未知数,应当是有解的。但是其中含有sin和cos,是非线性超越方程,求解难度很大,应到考虑到解是否存在,多解以及求解方法的问题。
0.2 解的存在性
这里引入三个概念,
工作空间(workspace):操作臂末端的执行器所能达到的范围。
灵巧工作空间(dexterous workspace):机器人末端执行器能从各个方向达到的空间。
可达工作空间(reachable workspace):机器人至少从一个方向上可以道德的空间。
从上述概念可以分析得到,如果要求解存在,那么期望点一定在工作空间内才行。
我们以两连杆机械臂为例,如果l1 = l2 = r,且关节旋转角能达到360°,那么其可达工作空间为半径为2r的圆,灵巧工作空间为原点;如果l1 ≠ l2,那么可达工作空间为外径l1 + l2,内径为|l1 - l2|的圆环,不存在灵巧工作空间。
一般的,当机械臂自由度小于6时,其不能到达三维空间内一般的目标位姿。
0.3 多解问题
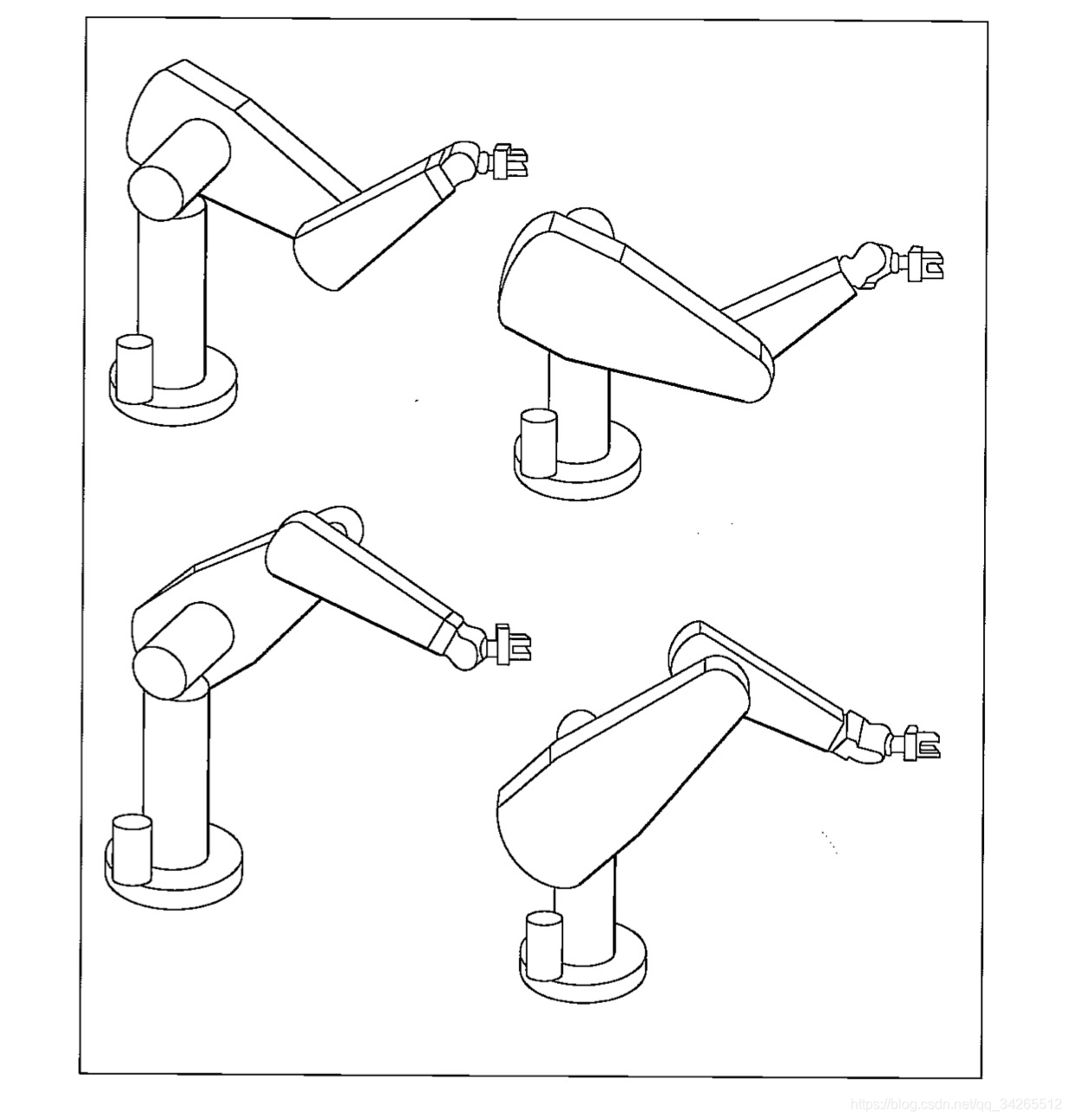
多解问题也很好理解,例如Puma560机械臂,对已确定目标可有8个不同解,但往往由于关节运动范围的限制,这8个解中的某些解不能实现。如下图所示:
0.4 解法
由于非线性方程组没有通用的求解算法&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2750
2750











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









