







 本文介绍了在Ubuntu16.04上利用SLAM技术进行单目相机的稠密重建过程,包括数据集制作、相机位姿获取和深度图重建。通过运行dense_mapping.cpp主程序,实现了对REMODE测试数据集的处理,展示了单目相机深度估计的实际效果。
本文介绍了在Ubuntu16.04上利用SLAM技术进行单目相机的稠密重建过程,包括数据集制作、相机位姿获取和深度图重建。通过运行dense_mapping.cpp主程序,实现了对REMODE测试数据集的处理,展示了单目相机深度估计的实际效果。
基于SLAM14讲13.3中提到的单目稠密重建方法,重建自己的单目相机图片的深度图。
我们已经制作了自己的数据集,而且我们现在也根据合适的算法得到了对应的相机位姿。那么就已经达到了单目相机深度估计的要求。下面这些例程使用的是公开的REMODE测试数据集。
例程效果如下
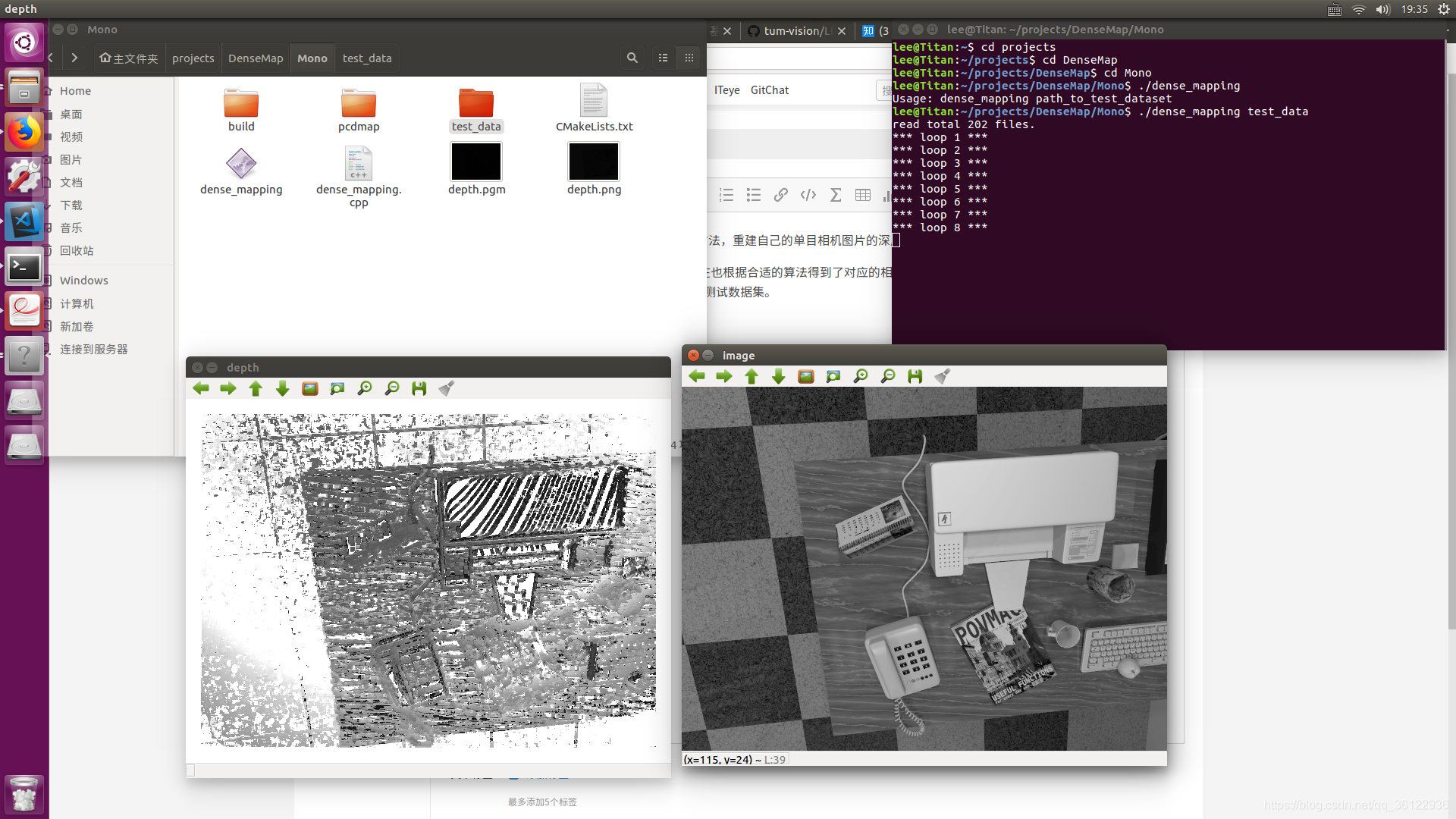
dense_mapping.cpp 主程序如下所示
#include <iostream>
#include <vector>
#include <fstream>
using namespace std;
#include <boost/timer.hpp>
// for sophus
#include <sophus/se3.h>
using Sophus::SE3;
// for eigen
#include <Eigen/Core>
#include <Eigen/Geometry>
using namespace Eigen;
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
/**********************************************
* 本程序演示了单目相机在已知轨迹下的稠密深度估计
* 使用极线搜索 + NCC 匹配的方式,与书本的 13.2 节对应
* 请注意本程序并不完美,你完全可以改进它——我其实在故意暴露一些问题。
***********************************************/
// ------------------------------------------------------------------
// parameters
const int boarder = 20; // 边缘宽度
const int width = 640; // 宽度
const int height = 480; // 高度
const double fx = 481.2f; // 相机内参
const double fy = -480.0f;
const double cx = 319.5f;
const double cy = 239.5f;
const int ncc_window_size = 2; // NCC 取的窗口半宽度
const int ncc_area = (2*ncc_window_size+1)*(2*ncc_window_size+1); // NCC窗口面积
const double min_cov = 0.1; // 收敛判定:最小方差
const double max_cov = 10; // 发散判定:最大方差
// ------------------------------------------------------------------
// 重要的函数
// 从 REMODE 数据集读取数据
bool readDatasetFiles(
const string& path,
vector<string>& color_image_files,
vector<SE3>& poses
);
// 根据新的图像更新深度估计
bool update(
const Mat& ref,
const Mat& curr,
const SE3& T_C_R,
Mat& depth,
Mat& depth_cov
);
// 极线搜索
bool epipolarSearch(
const Mat& ref,
const Mat& curr,
const SE3& T_C_R,
const Vector2d& pt_ref,
const double& depth_mu,
const double& depth_cov,
Vector2d& pt_curr
);
// 更新深度滤波器
bool updateDepthFilter(
const Vector2d& pt_ref,
const Vector2d& pt_curr,
const SE3& T_C_R,
Mat& depth,
Mat& depth_cov
);
// 计算 NCC 评分
double NCC( const Mat& ref, const Mat& curr, const Vector2d& pt_ref, const Vector2d& pt_curr );
// 双线性灰度插值
inline double getBilinearInterpolatedValue( const Mat& img, const Vector2d& pt ) {
uchar* d = & img.data[ int(pt(1,0))*img.step+int(pt(0,0)) ];
double xx = pt(0,0) - floor(pt(0,0));
double yy = pt(1,0) - floor(pt(1,0));
return (( 1-xx ) * ( 1-yy ) * double(d[0]) +
xx* ( 1-yy ) * double(d[1]) +
( 1-xx ) *yy* double(d[img.step]) +
xx*yy*double(d[img.step+1]))/255.0;
}
// ------------------------------------------------------------------
// 一些小工具
// 显示估计的深度图
void p 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









