






在强化学习领域,Gym、Gymnasium 和 Isaac Gym 是经常被提到的工具库。它们名字相似,却有不同的应用场景和特点。
本文将详细解析它们的关系和区别,帮助你选择最适合的工具。
以常见的机器人强化学习任务:Panda 机械臂堆叠任务(Panda Cube-Stacking)为例,本文通过 Gymnasium 和 Isaac Gym 的实现对比,展示两者在代码结构、性能、适用场景上的不同。由于Gymnasium是Gym的升级版本,两者几乎一样,所以未展示Gym的任务。
一、Gym
Gym 是由 OpenAI 开发的经典强化学习环境库,自 2016 年发布以来,一直是强化学习研究的基石。
1. Gym 的特点
- 提供了大量强化学习环境,如
CartPole、MountainCar、Atari游戏等。 - 定义了标准的接口(如
reset、step),方便快速上手强化学习任务。
2. Gym 的问题
- OpenAI 在维护 Gym 上逐渐减少投入。
- 某些功能(如环境注册和依赖管理)在后期版本中开始出现问题。
- Gym 停止更新后,很多用户开始转向其他替代方案。
二、Gymnasium
Gymnasium 是由社区主导开发的 Gym 的一个分支(fork),作为 Gym 的升级版。
1. Gymnasium 的改进
- 完全兼容:Gymnasium 兼容 Gym 的 API,迁移非常简单。
- 类型提示和错误检查:在
reset和step等方法中增加了类型检查和提示。 - 支持现代 Python:支持 Python 3.10 及以上版本。
- 社区支持:持续修复问题,并添加新特性。
2. 如何迁移到 Gymnasium
只需将代码中的 import gym 替换为 import gymnasium as gym,代码基本无需修改。
3. 使用 Gymnasium 实现 Panda Cube-Stacking
Panda Cube-Stacking 的目标是用 Panda 机械臂抓取并堆叠方块,还需安装panda-gym ,提供 Panda 环境。
代码实现
import gymnasium as gym
import panda_gym
from stable_baselines3 import SAC
# 创建 Panda 堆叠任务环境
env = gym.make("PandaStack-v3")
# 使用 Soft Actor-Critic (SAC) 算法
model = SAC("MlpPolicy", env, verbose=1)
model.learn(total_timesteps=50000)
# 测试模型
obs, _ = env.reset()
for _ in range(200):
action, _ = model.predict(obs)
obs, reward, done, _, _ = env.step(action)
env.render() # 渲染动画
if done:
break
env.close()
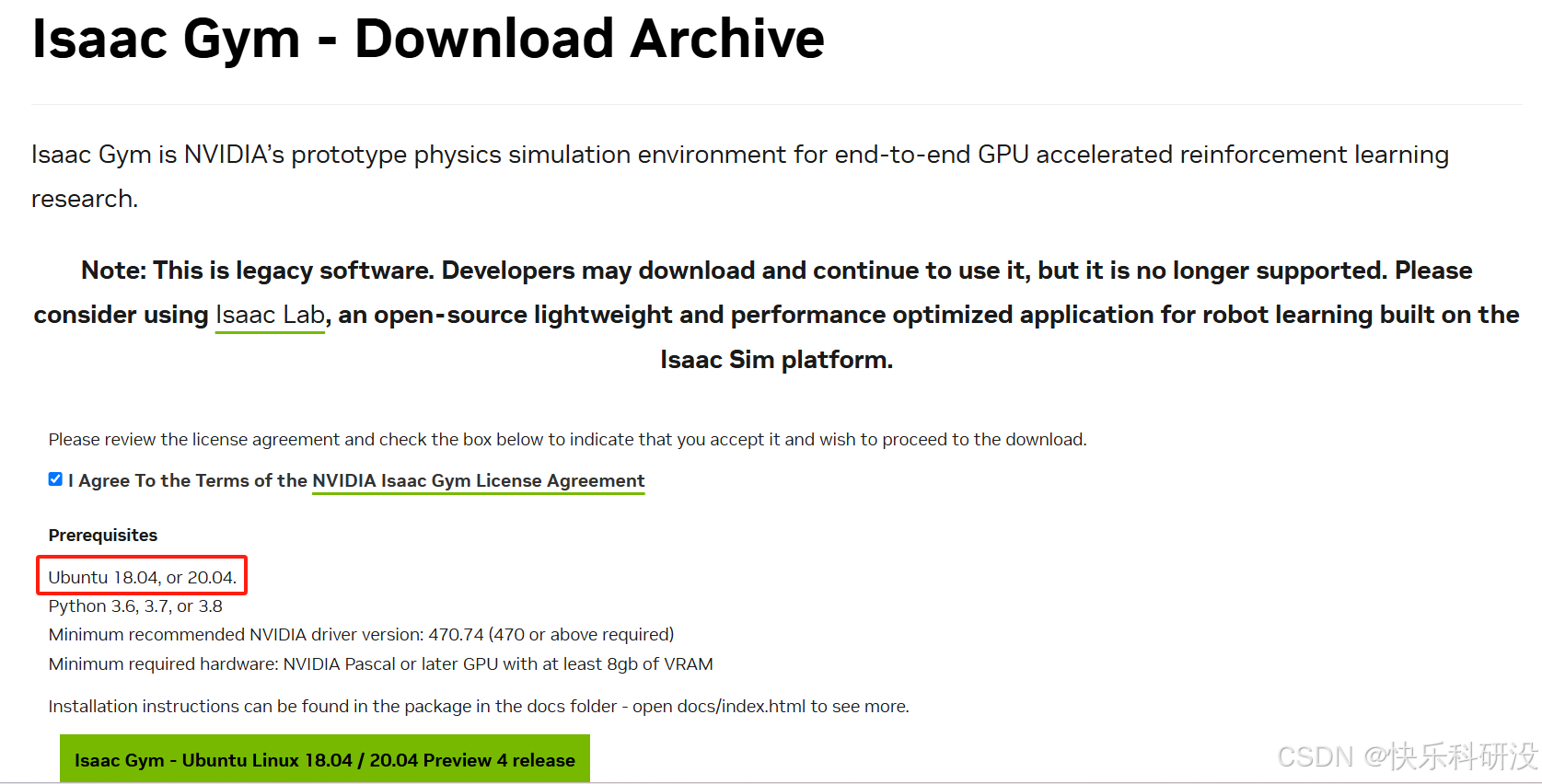
三、Isaac Gym
Isaac Gym 是 NVIDIA 开发的高性能物理仿真平台,专注于机器人仿真和大规模强化学习任务。
1. Isaac Gym 的特点
- GPU 加速:基于 GPU 提供高性能仿真,比 Gym 快数百倍。
- 真实物理模拟:支持机器人、机械臂、关节动力学等真实物理任务。
- 兼容 Gym API:API 设计与 Gym 类似,方便迁移已有代码。
2. 适用场景
- 机器人强化学习(如机械臂控制)。
- 高性能仿真和需要大规模并行训练的任务。
3. 使用 Isaac Gym实现 Panda Cube-Stacking
import isaacgym
from isaacgym import gymapi, gymutil
from isaacgym.envs.base.vec_task import VecTask
# 初始化 Isaac Gym
gym = gymapi.acquire_gym()
sim_params = gymapi.SimParams()
sim_params.physx.solver_type = 1 # 使用 PhysX 求解器
sim_params.use_gpu_pipeline = True # 使用 GPU 加速
# 创建环境
env = VecTask(sim_params=sim_params, task="FrankaCubeStacking")
# 训练任务
obs = env.reset()
for _ in range(1000):
actions = env.action_space.sample() # 随机动作
obs, reward, done, _ = env.step(actions)
env.render() # 显示机器人仿真动画
env.close()
比较遗憾的是IsaacGym目前只支持ubuntu系统,且已停止更新;想在windows系统运行,必须在Omniverse的IsaacSim中运行,而IsaacSim功能更强大,对系统硬件要求也更高,一般能装Isaac Sim的不会再用IsaacGym了~~
如果非得装,也有一些教程:windows下安装 isaac sim gym (OmniIsaacGymEnvs)。
四、三者关系总结
1. Gym 、Gymnasium、Isaac Gym对比
| 特性 | Gym | Gymnasium | Isaac Gym |
|---|---|---|---|
| 开发者 | OpenAI | 社区维护 | NVIDIA |
| 状态 | 停止更新 | 持续更新 | 持续更新 |
| 性能 | 基于 CPU | 基于 CPU | 基于 GPU,大规模并行仿真 |
| 主要用途 | 通用强化学习环境 | 通用强化学习环境 | 高性能机器人物理仿真 |
| 兼容性 | - | 兼容 Gym API | 类似 Gym API |
| 是否推荐 | 不推荐(已弃用) | 推荐 | 推荐(适合高性能仿真任务) |
2. Gymnasium 与 Isaac Gym 对比
在强化学习和机器人仿真领域,Gymnasium 和 Isaac Gym 是两个常用的工具。
| 特性 | Gymnasium | Isaac Gym |
|---|---|---|
| 目标用户 | 强化学习初学者、通用任务开发者 | 机器人研究人员、高性能需求用户 |
| 性能 | 基于 CPU,适合小规模仿真 | 基于 GPU,加速复杂物理任务 |
| 环境类型 | 游戏、简单控制(如 CartPole) | 机器人物理仿真(如机械臂控制) |
| 硬件需求 | 普通计算机即可运行 | 需要 NVIDIA GPU |
| 适用场景 | 经典控制、博弈、Atari 游戏 | 机器人控制、机械臂仿真、大规模训练 |
| 渲染方式 | 简单动画(通过 env.render()) | 高精度 3D 动画(GPU 加速渲染) |
总结
-
Gymnasium 适合强化学习初学者,提供简单的环境和控制任务,能够在普通计算机上运行。它适用于经典控制、博弈、Atari 游戏等简单任务。
-
Isaac Gym 主要面向机器人研究人员和高性能需求用户,依赖 NVIDIA GPU 进行加速,适用于大规模并行仿真和高精度物理任务,如机械臂仿真、机器人控制等。
选择合适的工具,能够帮助你更高效地完成任务和实验。根据任务的复杂性和硬件环境,选择 Gymnasium 或 Isaac Gym 来进行强化学习和机器人控制研究。
五、如何选择?
-
Gymnasium:
- 适用于普通强化学习任务,是 Gym 的直接替代品。
- 社区活跃,未来支持有保障。
-
Isaac Gym:
- 如果研究涉及机器人或高性能仿真,推荐使用 Isaac Gym。
- 适合需要极高仿真速度的任务。
-
Gym:
- 仅适用于旧代码。如果可能,建议迁移到 Gymnasium。
如果本文对你有帮助,请点赞、收藏并分享给更多小伙伴!


















 4855
4855

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









