






AUTOSAR CanTSyn模块配置与代码实现
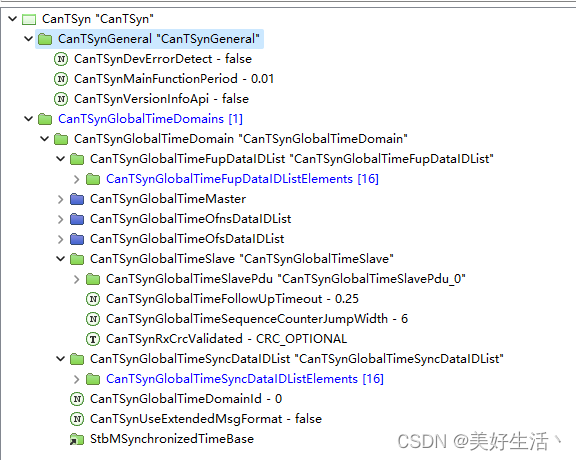
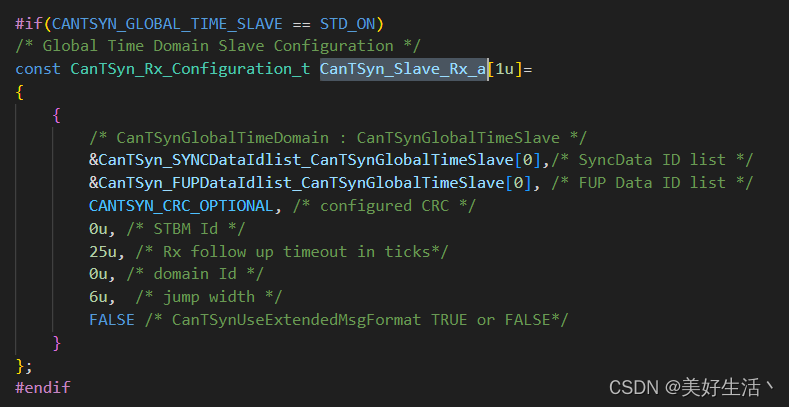
1、CanTSyn模块配置
2、CanTSyn_RxIndication
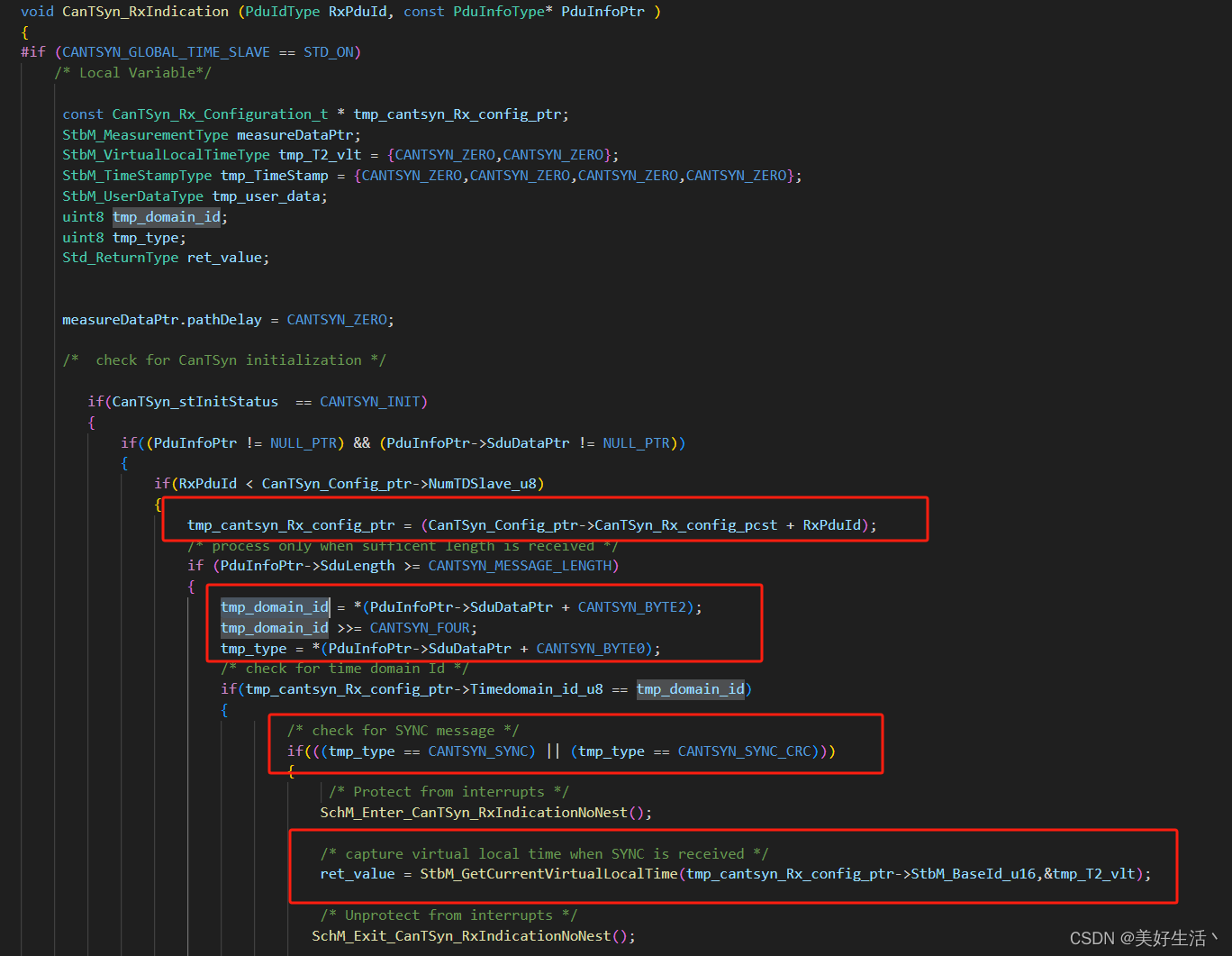
CanTSyn_Config_ptr指向配置的结构体,RxPduId只有一条报文的话,RxPduId=0
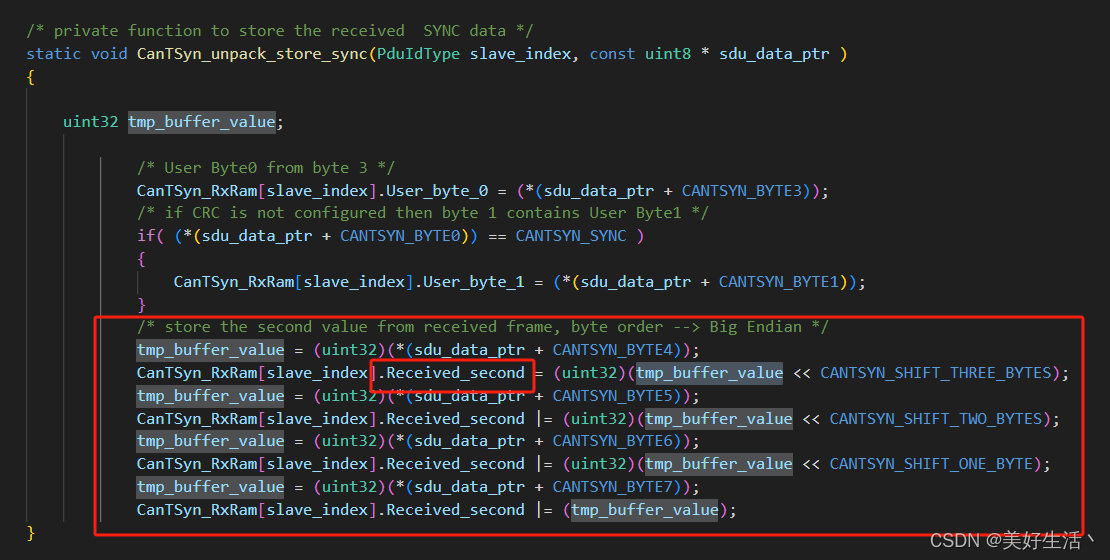
下面是解析接收到的报文的各个参数。
SYNC报文的格式分为两种,一种是带CRC的,一种是不带CRC的。

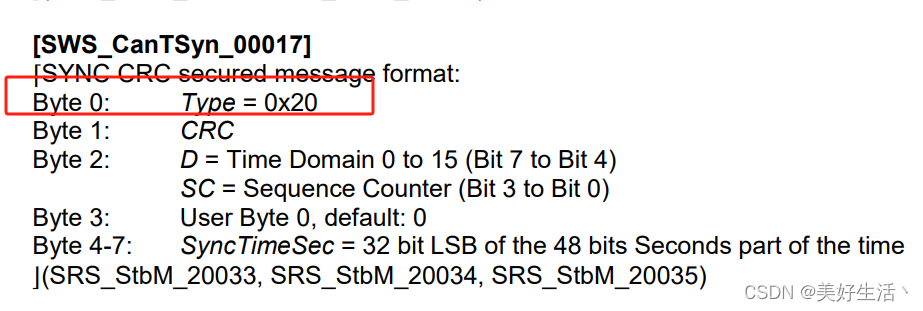

temp_domain_id在地2个字节的bit7-bit4
tmp_type在第1个字节
3、同步报文的处理
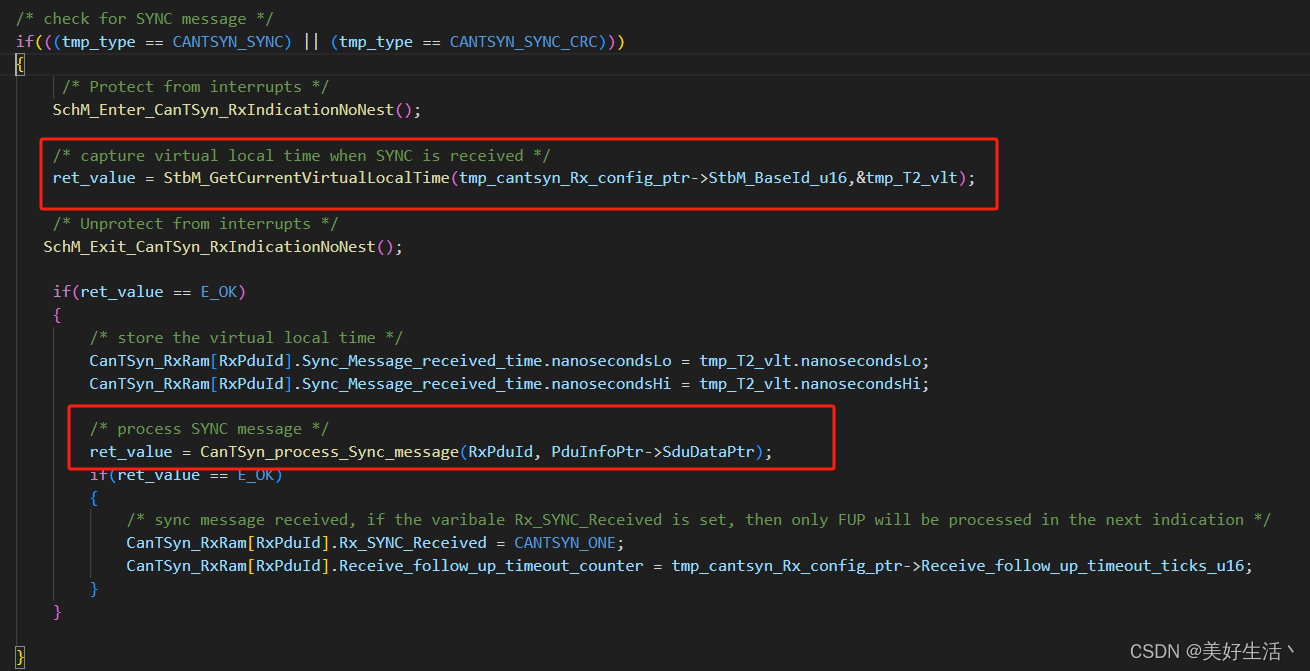 首先获取收到同步报文的时候的本地时间,并存储下来
首先获取收到同步报文的时候的本地时间,并存储下来
然后开始处理SyncMessage
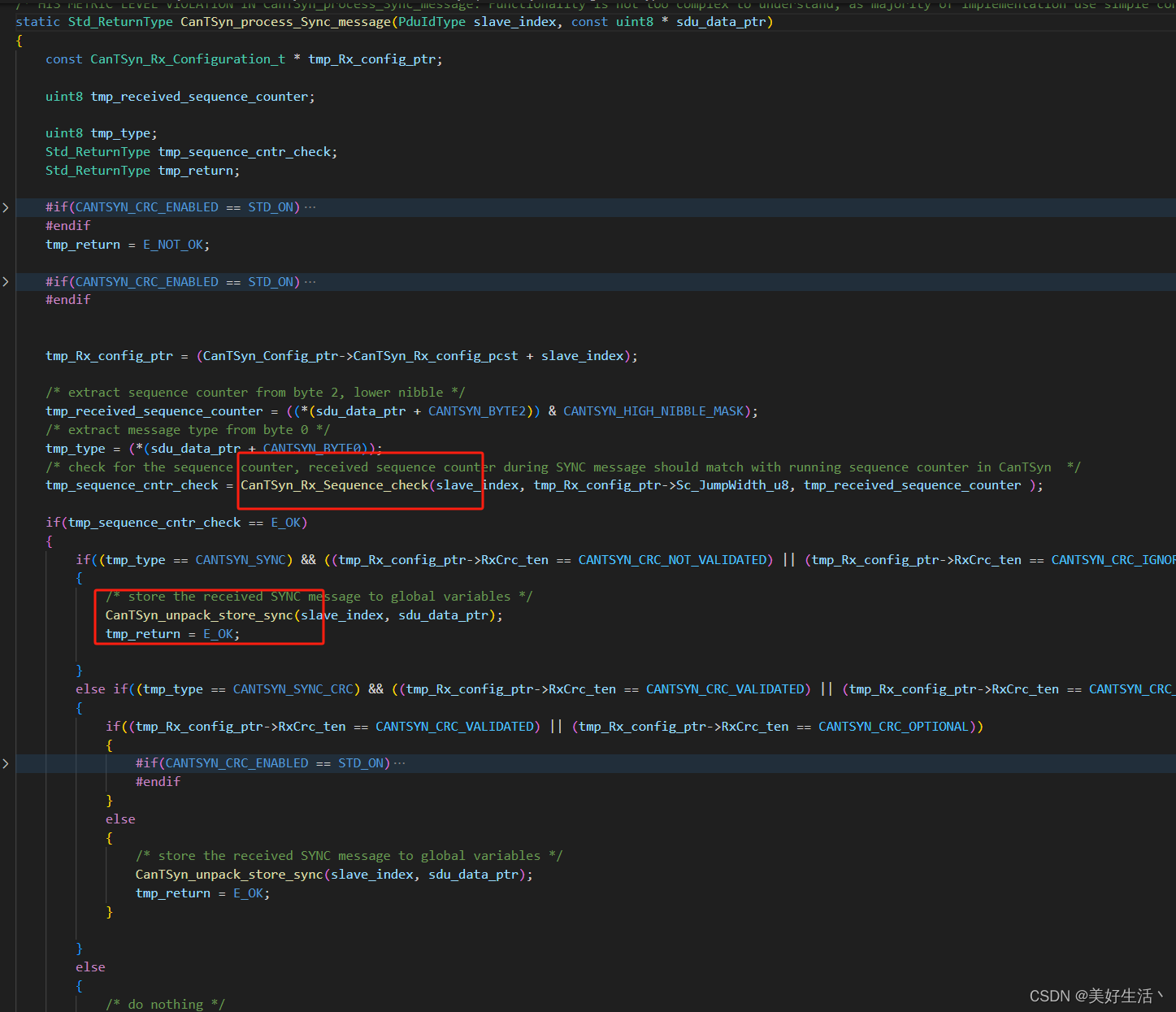
第一个是判断接收到的sequence是否在合理的范围内,如果超过了我们配置的JumpWidth值,就不接收此次的同步报文。
第二个就是在所有的都成功后,处理接收的同步报文,并存储接收到的全局时间。
4、在报文处理结束后,如果是正常接收,就会记录当前以接收SYNC报文,并设置标志以及等待接收FUP报文的超时时间。

















 2978
2978











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











