







1、Dijstra算法,算法流程
关键
初始化:
算法是基于图搜索的思想,所以需要先构建一个图,图中不包含障碍物,读入起点和终点信息,设置一个以代价作为键值排序的multiMap,起点入队,并设置起点是被标记过的,
进入循环
起点出队,multiMap移除这点,判断当前节点是否是终点,如果为终点则跳出循环,以这点作为邻居节点的当前结点,获取图中当前结点的邻居节点,各自到当前结点的代价距离,然后对所有邻居节点进行遍历,如果是之前已经标记过的,那么判断到起点的代价距离是否比当前大,如果大,则更新,并把邻居节点的前置节点设为当前结点,如果未标记,将该点的前置节点设为当前结点,并加入multiMap,标记上,然后重复这个过程直到multiMap为空,然后反转得到路径
2、RRT算法流程;
keyword: 采样,迭代,树,两点之间是否联通
首先初始化,输入起点,终点,地图信息
设置迭代次数,开始迭代,在地图无障碍区域进行采样,获得采样点,然后寻找与采样树中最近的点,以一定的步长扩展新的节点,判断二者连接是否存在障碍物,无障碍物则扩展新的节点到树中,循环这个过程,直到终点被加入树中,当然这需要满足一定的阈值。反向查询,最后生成路径
初始化整个空间,定义初始点、终点、采样点数、点与点之间的步长t等信息 在空间中随机产生一个点xrand 在已知树的点集合中找到距离这个随机点最近的点xnear 在xnear到xrand的直线方向上从xnear以步长t截取点xnew 判断从xnear到xnew之间是否存在障碍物,若存在则舍弃该点 将new点加入到树集合中 循环2~6,循环结束条件:有一个new点在终点的设定邻域内
(225条消息) RRT与RRT_算法具体步骤与程序详解(python)问题很多de流星的博客-CSDN博客_rrt算法
3、你用过的路径规划算法原理及特点
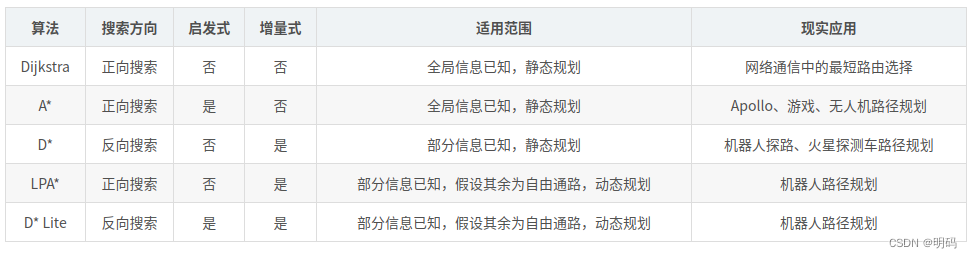
启发式搜索是利用启发函数来对搜索进行指导,从而实现高效的搜索
A 算法是一种在静态地图中求解最短路径的直接搜索方法。_
4 说一下a*算法的流程
初始化open_set和close_set;
- 将起点加入open_set中,并设置优先级为0(优先级最高);
- 如果open_set不为空,则从open_set中选取优先级最高的节点n:
- 如果节点n为终点,则:
- 从终点开始逐步追踪parent节点,一直达到起点;
- 返回找到的结果路径,算法结束;
- 如果节点n不是终点,则:
- 将节点n从open_set中删除,并加入close_set中;
- 遍历节点n所有的邻近节点:
- 如果邻近节点m在close_set中,则:
- 跳过,选取下一个邻近节点
- 如果邻近节点m也不在open_set中,则:
- 设置节点m的parent为节点n
- 计算节点m的优先级
- 将节点m加入open_set中
5、 A*算法中openlist和closelist的作用,节点如何更新?
openlist存放已经获取到的邻居节点,但是还未处理,
closelist 存放的是已经处理过的节点
对于不是openlist的节点,将其加入优先队列中, 已经在的话则需要根据代价判断是否更新;而对于closelist存放的不再处理
6、hybrid A*算法以及优化
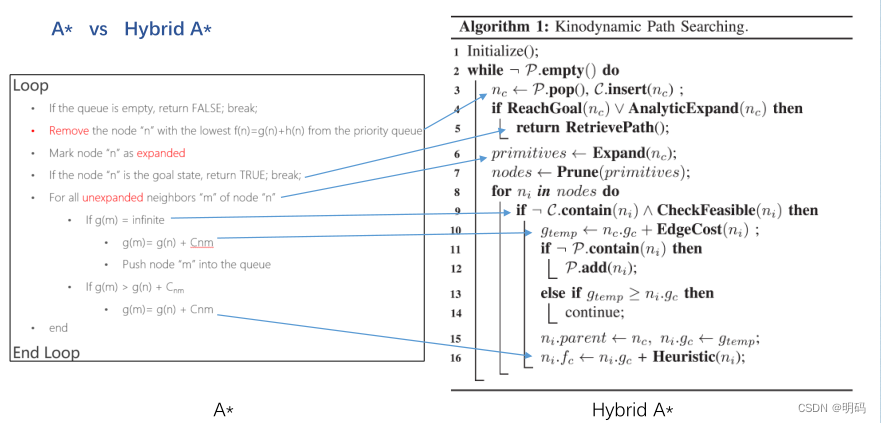
混合A再A算法的基础上考虑了车辆的运动学模型,即满足车辆的最大曲率约束,计算代价时考虑进去。
与A*区别:
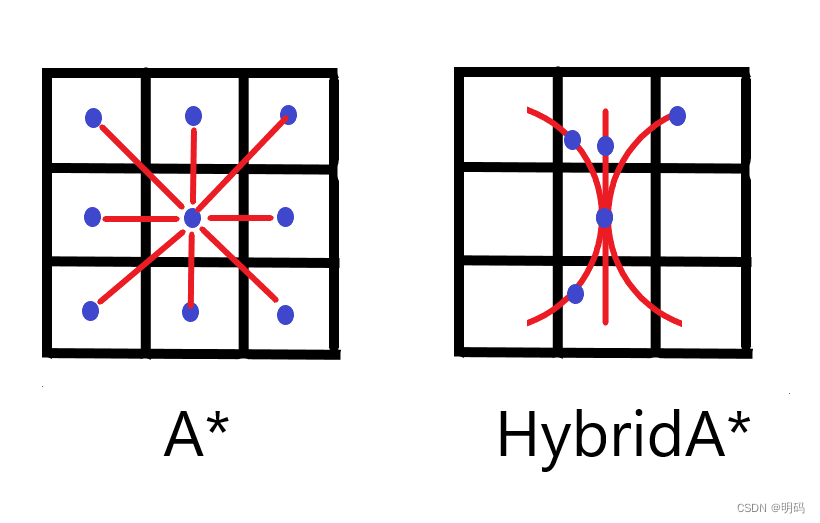
扩展方式
A扩展时是从当前栅格的中心点,扩展到周围八个栅格的中心点,路径是两两中心点的连线
HybridA扩展一共六个方向,左圆前进、倒车,直线前进、倒车,右圆前进、倒车,通过系统状态方程进行扩展
A到达新的栅格,位置必定是栅格中心,而HybridA到达的位置可以是路径上的任一点。
连通图结构
混合A* 除了考虑(x,y)维度外,还考虑量车辆姿态 θ
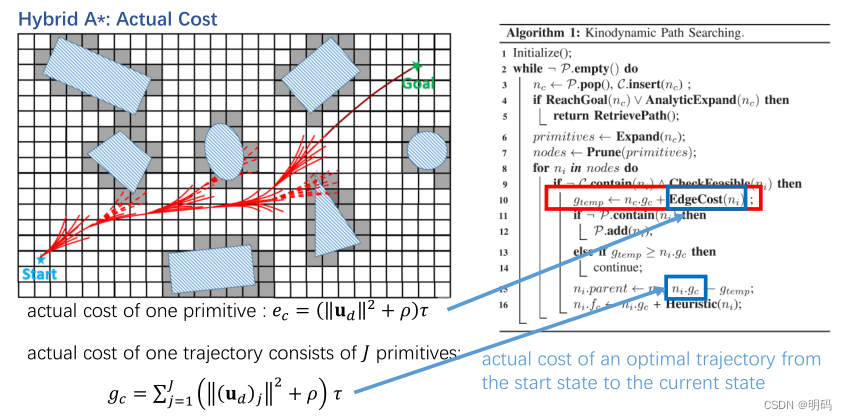
启发函数:
混合A表示从当前节点位姿到终点位姿的,同时满足避障条件及车辆运动学约束条件的最短路径长度,分为non-holonomic without-obstacle和 with obstacles AnalyticExpand(nc)两种类型启发函数,考虑障碍物与否区分
对于无障碍物采用Reeds-Sheep曲线生成,如果路径与障碍物发生重叠,采用动态规划或者A搜索路径;
接近目标点
混合A靠近目标点直接连接即可,因为采样不一定能刚好到目标点,同时也是为了提升效率
A则要求搜索的当前节点为目标点
7 、 蚁群算法和常见的搜索算法有什么不同
正反馈,信息素
用蚂蚁的行走路径表示待优化问题的可行解,整个蚂蚁群体的所有路径构成待优化问题的解空间。路径较短的蚂蚁释放的信息素量较多,随着时间的推进,较短的路径上累积的信息素浓度逐渐增高,选择该路径的蚂蚁个数也愈来愈多。最终,整个蚂蚁会在正反馈的作用下集中到最佳的路径上,此时对应的便是待优化问题的最优解。
(1)采用正反馈机制,使得搜索过程不断收敛,最终逼近最优解。
(2)每个个体可以通过释放信息素来改变周围的环境,且每个个体能够感知周围环境的实时变化,个体间通过环境进行间接地通讯。
(3)搜索过程采用分布式计算方式,多个个体同时进行并行计算,大大提高了算法的计算能力和运行效率。
(4)启发式的概率搜索方式不容易陷入局部最优,易于寻找到全局最优解。 [4]
8、 基于图论的规划方法其缺点是什么
不适合于高维问题,需要事先建立图,
9.曼哈顿距离与欧式距离的优缺点,
欧氏距离

D ( x , y ) = ∑ i = 1 n ( x i − y i ) 2 D(x, y)=\sqrt{\sum_{i=1}^{n}\left(x_{i}-y_{i}\right)^{2}} D(x,y)=i=1∑n(xi−yi)2
曼哈顿距离:

D ( x , y ) = ∑ i = 1 k ∣ x i − y i ∣ D(x, y)=\sum_{i=1}^{k}\left|x_{i}-y_{i}\right| D(x,y)=i=1∑k∣xi−yi∣
| Eulidean | Manhattan | |
| cons | 对异常数据敏感,往往需要归一化处理 由于计算的各个维度差异同等对待,所以无法对各个维度差异进行区别,不适合处理高维数据 | 对异常数据敏感,往往需要归一化处理 |
| pros | 计算速度快,直观 | 计算速度快,可以用于处理高维数据 |
对于向量之间的差异进行计算过程中,各个维度差异的权值不同
常见距离度量方法优缺点对比!_mob604756ea26ec的技术博客_51CTO博客
(186条消息) 欧式距离和曼哈顿距离的比较_AliceWanderAI的博客-CSDN博客_曼哈顿距离和欧式距离
9说说DP算法的过程
这个可以参考
算法题64. 最小路径和
思想:把多阶段的决策过程转化为一系列单阶段的最优化问题来解决
逆向寻优,正向求值
应用
百度apollo中的em_planner也有用到DP的思想进行局部路径的搜索,再用QP的方式进行轨迹平滑。















 1131
1131











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









