






HW2(3) 基于MPC的火箭软着陆问题
题目需求
在本问题中,我们将比较TILQR(时不变LQR)与QP-based MPC控制器在火箭发射器的软着陆问题上的性能比较。(着陆问题是一个stablization问题,一般用时不变LQR)
流程:
- 系统动力学与离散化
- 参考轨迹设计
- LQR控制器设计
- MPC控制器设计
- 无约束
- 有约束
- 改变Horizon长度
系统动力学与离散化
为了简化处理,我们仅考虑一个平面版本的火箭着陆问题,通过调整推力的大小和方向来控制火箭的位移和旋转,其系统方程为
x
=
[
p
x
p
z
θ
v
x
v
z
ω
T
ϕ
]
,
u
=
[
T
˙
ϕ
˙
]
,
x
˙
=
[
v
z
v
z
ω
T
m
cos
(
θ
+
ϕ
)
T
m
sin
(
θ
+
ϕ
)
T
2
J
L
sin
(
ϕ
)
T
˙
ϕ
˙
]
(1)
\begin{align} x = \begin{bmatrix} p_x \\ p_z \\ \theta \\ v_x \\ v_z \\ \omega \\ T \\ \phi \end{bmatrix}, \quad u = \begin{bmatrix} \dot{T} \\ \dot{\phi} \end{bmatrix}, \quad \dot{x} = \begin{bmatrix} v_z \\ v_z \\ \omega \\ \frac{T}{m} \cos{(\theta + \phi)} \\ \frac{T}{m} \sin{(\theta + \phi)} \\ \frac{T}{2J} L \sin(\phi) \\ \dot{T} \\ \dot{\phi} \end{bmatrix} \end{align}\tag{1}
x=
pxpzθvxvzωTϕ
,u=[T˙ϕ˙],x˙=
vzvzωmTcos(θ+ϕ)mTsin(θ+ϕ)2JTLsin(ϕ)T˙ϕ˙
(1)
其中
p
x
p
z
θ
p_x \ p_z \ \theta
px pz θ分别是水平位移、竖直位移和倾角,
v
x
v
y
w
v_x \ v_y \ w
vx vy w是前者的速度,
T
T
T是总推力,
ϕ
\phi
ϕ是推力角度,输入变量是两者的变化量。为了保证控制系统稳定、安全,应该将总推力限制为75%–150%的自身重力,推力角限制在$\pm
10
度,火箭倾角限制在
10度,火箭倾角限制在
10度,火箭倾角限制在\pm$5度(这样限制的原因也是为了防止系统离线性化点太远,则根据线性化模型算出来的最优控制率就会变得不准确)。
∣
θ
∣
≤
5
∘
∣
ϕ
∣
≤
1
0
∘
z
≥
0
0.75
≤
1
m
g
T
≤
1.5
(2)
\begin{align} |\theta | &\leq 5^{\circ} \\ |\phi| & \leq 10^{\circ} \\ z &\geq 0 \\ 0.75 &\leq \frac{1}{mg} T \leq 1.5 \end{align}\tag{2}
∣θ∣∣ϕ∣z0.75≤5∘≤10∘≥0≤mg1T≤1.5(2)
将系统在平衡点线性化后,设计对应的MPC或LQR稳定控制率。
model = PlanarRocket(max_roll=5.0) # 动力学模型来自RobotZoo库
n,m = state_dim(model), control_dim(model)
xeq = [zeros(6); model.m*model.g; 0] # 设置线性化点
ueq = zeros(2)
norm(dynamics(model, xeq, ueq)) ≈ 0 # make sure it's an equilibrium point
dt = 0.1 # time step (s)
tf = 25 # time horizon (s)
N = Int(tf / dt) + 1
# Evaluate the contimous and discrete Jacobians
zeq = KnotPoint(xeq,ueq,dt) # create a `KnotPoint` type that stores everything together
∇f = RobotDynamics.DynamicsJacobian(model) #获得雅可比矩阵函数J(z)
jacobian!(∇f, model, zeq) # 给定特定点求雅可比矩阵的值
discrete_jacobian!(RK4, ∇f, model, zeq) # 离散化
# Extract pieces of the Jacobian
A = ∇f.A
B = ∇f.B;
在本次作业中,LQR和MPC的权重矩阵设计使用了Bryson’s Rule,它避免了LQR问题参数整定的频繁trail and error method,可以作为一个较好的初始值使用Q R,它指出,Q R矩阵可以指定成最大容许状态误差的和最大容许输入的平方倒数。
在本例中,
Q
=
d
i
a
g
[
1
5
2
,
1
5
2
,
1
(
5
π
/
180
)
2
,
1
5
2
,
1
5
2
,
1
(
5
π
/
180
)
2
,
1
(
0.1
m
g
)
2
,
1
(
10
π
/
180
)
2
]
R
=
d
i
a
g
[
1
(
20
m
g
)
2
,
1
(
10
π
/
180
)
2
]
(3)
\begin{align} Q&=diag{[\frac{1}{5^2},\frac{1}{5^2},\frac{1}{(5\pi/180)^2},\frac{1}{5^2},\frac{1}{5^2},\frac{1}{(5\pi/180)^2},\frac{1}{(0.1mg)^2},\frac{1}{(10\pi/180)^2}]}\\ R &= diag{[\frac{1}{(20mg)^2},\frac{1}{(10\pi/180)^2}]} \end{align}\tag{3}
QR=diag[521,521,(5π/180)21,521,521,(5π/180)21,(0.1mg)21,(10π/180)21]=diag[(20mg)21,(10π/180)21](3)
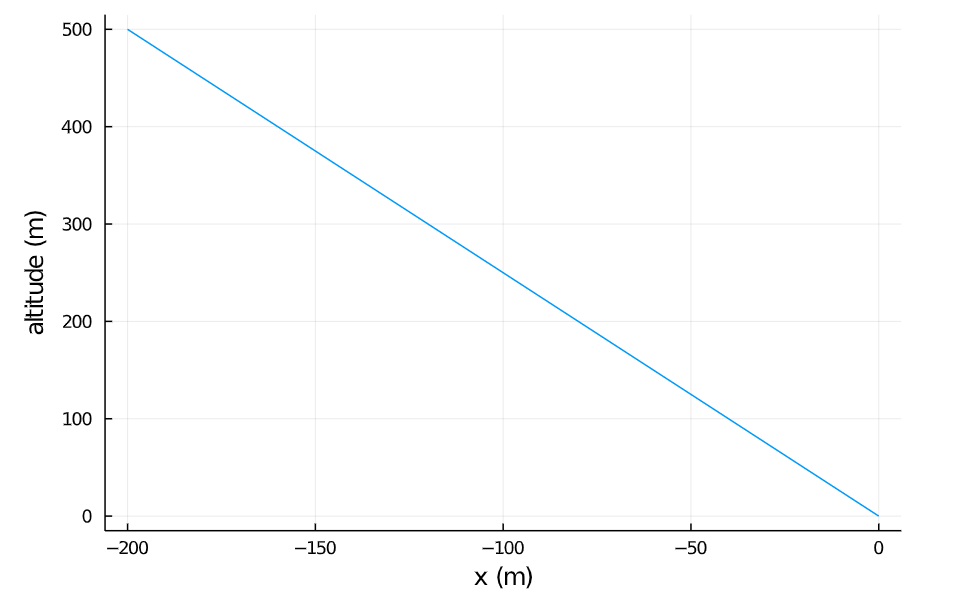
参考轨迹设计
我们使用简单的线性插值来设计一个参考轨迹,
function nominal_trajectory(x0,N,dt)
Xref = [zero(x0) for k = 1:N] #初始化变量
pos = range(x0[1:3], zeros(3), length=N) #对x y theta线性插值
# TODO: Design a trajectory that linearly interpolates from x0 to the origin
for i=1:(N-1)
Xref[i][1:3] = pos[i]
Xref[i][4:6] = (pos[i+1]-pos[i]) / dt
Xref[i][7:8] = x0[7:8] # 推力的角度即保持之前值,其实线性插值是一样的,因为起点终点都不变,都是在平衡点处
end
Xref[end] = Xref[N-1]
# Convert to static arrays for plotting
return SVector{8}.(Xref)
end
x0_ref = [-200, 500, 0, 0, 0, 0, 0, 0.] + xeq # 起点在位置为-200,500,注意,其他量不是全0,推力作为一种状态是有值的
# Generate reference trajectory
Xref = nominal_trajectory(x0_ref,N,dt)
Uref = [copy(ueq) for k = 1:N] # Uref是用来算Cost的,参考值是悬停态(平衡态)的输入值
tref = range(0,tf, length=N)
设计LQR控制器
有了系统平衡点的线性模型、优化问题的Q R和参考轨迹之后,设计一个LQR控制器来将系统稳定到平衡点就是个简单的问题了(只要别离平衡点太远)。从HW2(1) 中可以看出,在stablization问题中,无限时域的LQR往往比有限时域的LQR的表现更好,因此我们在本问题中也使用无限时域的LQR控制器。
运行结果如下,从结果中可以看出,LQR控制器在着陆时,甚至陷进去地面去了,因此肯定是实际不可行的。
function get_control(ctrl::LQRController, x, t)
u = zero(ctrl.Uref[1])
k = get_k(ctrl, t)
u = ctrl.Uref[k] - ctrl.K * (x - ctrl.Xref[k])
# 这里形式与前面作业中HW2(1)或Lecture 9还不同,前面我们取Uref[k] = U_balance Xref[k] = X_balance
# 而这里我们给每一个中间时刻都设计一个参考轨迹点,防止初始时候误差太大,导致系统的输出太离谱
return u
end
function lqr(A,B,Q,R; P=Matrix(Q), tol=1e-8, max_iters=400, verbose=false)
n,m = size(B) # 初始化
K = zeros(m,n)
K = dlqr(A,B,Q,R) # 偷懒,调库求解,具体实现方式参考HW2(1)(2)
P = dare(A,B,Q,R)
return K,P
end
MPC控制器
MPC控制器与Lecture 9的形式基本相同,最大的区别在于,这里每个轨迹点的参考点是不同的,并不都是在平衡点,而是一个线性插值的参考轨迹(MPC运行过程中,时间窗口一直往前,因此参考轨迹也沿着轨迹曲线一直往前取,以步长N索引,若窗口终点超过了参考轨迹的终点,则后面的参考都取在参考轨迹的终点,表示要稳定在终点),所有的参考输入都是悬停输入。
将MPC问题转换成一个QP问题,
minimize
z
1
2
z
T
P
z
+
q
T
z
subject to
D
z
=
d
C
z
≤
d
(4)
\begin{align} &\text{minimize}_{z} && \frac{1}{2} z^T P z + q^T z \\ &\text{subject to} && D z = d \\ &&& C z \leq d \\ \end{align}\tag{4}
minimizezsubject to21zTPz+qTzDz=dCz≤d(4)
其中,
x
ˉ
\bar{x}
xˉ是参考轨迹,其中当
x
=
x
ˉ
x=\bar{x}
x=xˉ时取Cost取最小值。因为整个系统都是在悬停态平衡点点线性化的,所以都要减去平衡点的值。
[
B
−
I
A
B
−
I
⋱
A
B
−
I
]
[
u
1
x
2
u
2
⋮
x
N
−
1
u
N
−
1
x
N
]
=
[
−
A
(
x
1
−
x
e
q
)
0
⋮
0
]
(5)
\begin{align} \begin{bmatrix} B & -I \\ & A & B & -I \\ & & & & \ddots \\ & & & & & A & B -I \\ \end{bmatrix} \begin{bmatrix} u_1 \\ x_2 \\ u_2 \\ \vdots \\ x_{N-1} \\ u_{N-1} \\ x_N \end{bmatrix} = \begin{bmatrix} -A (x_1 - x_{eq}) \\ 0 \\ \vdots \\ 0 \end{bmatrix} \end{align}\tag{5}
B−IAB−I⋱AB−I
u1x2u2⋮xN−1uN−1xN
=
−A(x1−xeq)0⋮0
(5)
P = [ R Q ⋱ R Q f ] , q = [ − R ( u ˉ 1 − u e q ) − Q ( x ˉ 2 − x e q ) ⋮ − R ( u ˉ N − 1 − u e q ) − Q f ( x ˉ N − x e q ) ] (6) \begin{align} P = \begin{bmatrix} R \\ & Q \\ && \ddots \\ &&& R \\ &&&& Q_f \end{bmatrix}, \quad q = \begin{bmatrix} -R(\bar{u}_1 - u_{eq}) \\ -Q(\bar{x}_2 - x_{eq}) \\ \vdots \\ -R(\bar{u}_{N-1} - u_{eq}) \\ -Q_f(\bar{x}_N - x_{eq}) \\ \end{bmatrix} \end{align}\tag{6} P= RQ⋱RQf ,q= −R(uˉ1−ueq)−Q(xˉ2−xeq)⋮−R(uˉN−1−ueq)−Qf(xˉN−xeq) (6)
本问题中 u ˉ = u e q \bar{u}=u_{eq} uˉ=ueq,所以 q q q中不包含有 R R R项
代码主要包含两个函数,初始化QP,和更新QP,初始化QP主要是写 P D C P \ D \ C P D C矩阵的值,在整个MPC更新过程都不改变,而随着时间的往前,参考轨迹不断变化,因此要修改 d d d来设定起始点与参考点。
function buildQP!(ctrl::MPCController, A,B,Q,R,Qf; kwargs...)
for j = 1:(N-2) # N是MPC的前瞻步长,Horizon大小 n是状态维度 m是输入维度
ctrl.P[((j-1)*(n+m)).+(1:m),((j-1)*(n+m)).+(1:m)] .= R # (j-1)*(n+m)代表跳过前j-1个(u x)变量 (u1与x2为一对)
ctrl.P[(m+(j-1)*(n+m)).+(1:n),(m+(j-1)*(n+m)).+(1:n)] .= Q # (j-1)*(n+m)+m代表跳过跳过前j-1个(x u)变量+本次的u
end
ctrl.P[((N-2)*(n+m)).+(1:m),((N-2)*(n+m)).+(1:m)] .= R # R为m*m,Q为n*n
ctrl.P[(m+(N-2)*(n+m)).+(1:n),(m+(N-2)*(n+m)).+(1:n)] .= Qf # Qf一般与Q不一样,因此要单独设置
ctrl.A[1:n, 1:m] = B # 这个A矩阵指的是QP中的约束矩阵C和D
ctrl.A[1:n, m.+(1:n)] = -I(n) # C矩阵的第一行与其他行不一样,要单独设置
for j = 1:(N-2) # C矩阵的列是固定的一定是(m+n)*(N-1)列
# n+代表跳过第一个特殊的x1. A是与第j个x相乘,其索引为m+(j-1)*(n+m) m+代表跳过u1
ctrl.A[(n+(j-1)*n).+(1:n),(m+(j-1)*(n+m)).+(1:n)] .= A
# n+代表跳过第一个特殊的x1. B是与第j个u相乘,其索引为m+(j-1)*(n+m)+n),代表跳过u1和本次的x
ctrl.A[(n+(j-1)*n).+(1:n),(m+(j-1)*(n+m)+n).+(1:m)] .= B
ctrl.A[(n+(j-1)*n).+(1:n),(m+(j-1)*(n+m)+n+m).+(1:n)] .= -I(n)
end
if size(ctrl.A,1) > (N-1)*n # A矩阵是约束矩阵,正常来讲只有系统方程约束,则只有(N-1)*n行,若有其他约束,则会大于这个值
for i = 1:N-1 # 下面这一段填的是所有状态的约束 m代表跳过u1,(i-1)*(n+m)跳过前i对
ctrl.A[(N-1)*n+(i-1)*4+1, m+3+(i-1)*(n+m)] = 1 #x(3)
ctrl.lb[(N-1)*n+(i-1)*4+1] = -5/180.0*pi
ctrl.ub[(N-1)*n+(i-1)*4+1] = 5/180.0*pi
ctrl.A[(N-1)*n+(i-1)*4+2, m+8+(i-1)*(n+m)] = 1 #x(8)
ctrl.lb[(N-1)*n+(i-1)*4+2] = -10/180.0*pi
ctrl.ub[(N-1)*n+(i-1)*4+2] = 10/180.0*pi
ctrl.A[(N-1)*n+(i-1)*4+3, m+2+(i-1)*(n+m)] = 1 #x(2)
ctrl.lb[(N-1)*n+(i-1)*4+3] = 0.0
ctrl.ub[(N-1)*n+(i-1)*4+3] = Inf
ctrl.A[(N-1)*n+(i-1)*4+4, m+7+(i-1)*(n+m)] = 1 #x(7)
ctrl.lb[(N-1)*n+(i-1)*4+4] = -0.25*model.m*model.g
ctrl.ub[(N-1)*n+(i-1)*4+4] = 0.5*model.m*model.g
end
end
initialize_solver!(ctrl; kwargs...) # 初始化OSQP solver
return nothing
end
function update_QP!(ctrl::MPCController, x, time)
ctrl.lb[1:n] .= -A*(x - Xref[end]) #更新初始状态约束,一直线性化的点都是平衡点
ctrl.ub[1:n] .= -A*(x - Xref[end]) #初始状态处没有参考轨迹,是确定的,也不是优化变量
Q = ctrl.P[m+1:m+n,m+1:m+n]
Qf = ctrl.P[(N-2)*(n+m)+m+1:(N-1)*(n+m),(N-2)*(n+m)+m+1:(N-1)*(n+m)]
k = searchsortedlast(ctrl.times, time)
Nref = size(ctrl.Xref,1)
for j = 1:(N-2) #每个参考轨迹都是等步长的,Knot Point也是等步长的,从当前位置往后移
idx = k+j
if idx >= Nref # 若到终点了,则参考点选取为终点
idx = Nref
end
ctrl.q[(m+(j-1)*(n+m)).+(1:n)] .= -Q*(ctrl.Xref[idx]-ctrl.Xref[end])
end
idx = k+N-1
if idx >= Nref # 若到终点了,则参考点选取为终点
idx = Nref
end
ctrl.q[(m+(N-2)*(n+m)).+(1:n)] .= -Qf*(ctrl.Xref[idx]-ctrl.Xref[end])
return nothing
end
function get_control(ctrl::MPCController{OSQP.Model}, x, time)
update_QP!(ctrl, x, time)
OSQP.update!(ctrl.solver, q=ctrl.q, l=ctrl.lb, u=ctrl.ub)
# Solve QP
results = OSQP.solve!(ctrl.solver)
Δu = results.x[1:2] #只取u1来控制
k = get_k(ctrl, time) #得到当前时刻的参考点,零阶保持器形式
return ctrl.Uref[k] + Δu
end
仿真结果
从仿真结果(Horizon=50)可以看出,无论是无约束的MPC还是有约束(状态倾角约束)的MPC都比LQR运行得好,都能完成火箭软着陆任务,但是带约束的MPC在降落到地的时候会平缓一些。
从曲线结果可以看出,
- 不带约束的MPC在和LQR有明显的超调,但是MPC的超调小一些,原因是因为,MPC控制器相比LQR式的reactive controller显然有一种预测的作用,在到达地面前会提前采取一些措施,因而不会降到地面之下
- 带约束的MPC最终结果还是有一点点的超调,与优化器对硬约束的软化有关
- 当时间窗口Horizon取为1时,MPC的控制结果与LQR基本一样
- 当时间窗口Horizon取较小时,如21,降落曲线还是会有一些地面上的超调(高度高于地面)。

MPC无约束 |

MPC带约束 |

MPC/LQR对比(约束与Horizon) |

MPC horizon对比 |















 949
949

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









