






Lecture 1 系统状态方程、平衡点与稳定性
目录
- 连续系统状态方程(Continuous Time Dynamics)
- 仿射系统状态方程(Control-Affine System)
- 机械臂系统状态方程(Manipulator Dynamics)
- 线性系统
- 平衡点(Equilibria)
- 平衡点的稳定性(Stability)
连续时间系统动力学
对于连续系统而言,最通用的方式是用一个微分方程来描述系统的特性:
x
˙
=
f
(
x
,
u
)
(1)
\begin{align} \dot{x} &= f(x, u) \end{align}\tag{1}
x˙=f(x,u)(1)
其中,
x
x
x是系统的状态(state),u是系统的输入(input)。对于一个机器人系统来说,
x
x
x通常定义成
x
=
[
q
v
]
(2)
\begin{align} x &= \begin{bmatrix} q \\ v \end{bmatrix} \end{align}\tag{2}
x=[qv](2)
其中,
q
q
q是系统的configuration,
v
v
v是系统速度。
q
q
q所张成的空间叫做configuration space,整个state space是由
q
q
q和
v
v
v一起构成的流形(manifold)。这个系统描述只有在smooth的时候才是成立的,在某些时候,如四足点着地了,则方程不成立。
ps:在课上教授提了一句, q q q并不一定是属于 R n \mathbb{R}^n Rn的,但是 v v v一定是。比如对于单摆系统来说, q q q是单摆的角度,是属于 − π -\pi −π到 π \pi π的,因此它所张成的空间是一个圆(因为对于单摆系统来说,转满 π \pi π之后则单摆会到的又是 − π -\pi −π的空间了,因此这是一个自己包着自己的compact manifold)。但是对于 v v v来说,它的范围是负无穷到正无穷,因此是属于实数空间的。两者一起构成的state space因此是一个圆柱流形。二阶倒立摆的configuration space是一个圆环流形(torus)。
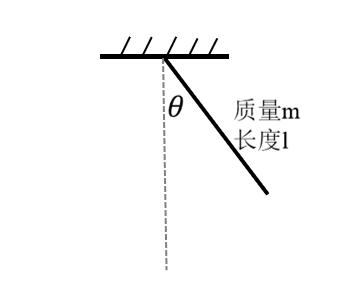
单摆系统
对于如图1所示的单摆系统,
m
l
2
θ
¨
+
m
g
l
sin
(
θ
)
=
τ
(3)
\begin{align} m l^2 \ddot{\theta} + m g l \sin(\theta) = \tau \end{align}\tag{3}
ml2θ¨+mglsin(θ)=τ(3)
其中,
l
l
l是单摆的长度,
θ
\theta
θ是单摆的角度,
τ
\tau
τ是输入的力矩。通过变换可以得出如下方程
x
˙
=
[
θ
˙
θ
¨
]
=
[
θ
˙
−
g
l
sin
θ
+
1
m
l
2
u
]
=
f
(
x
,
u
)
(4)
\begin{align} \dot{x} &= \begin{bmatrix} \dot{\theta} \\ \ddot{\theta} \end{bmatrix} = \begin{bmatrix} \dot{\theta} \\ -\frac{g}{l} \sin{\theta} + \frac{1}{m l^2} u \end{bmatrix} = f(x,u) \end{align}\tag{4}
x˙=[θ˙θ¨]=[θ˙−lgsinθ+ml21u]=f(x,u)(4)
仿射系统方程
许多系统,特别是机电系统(mechanical systems)都可以写成如下形式
x
˙
=
f
0
(
x
)
+
G
(
x
)
u
(5)
\begin{align} \dot{x} = f_{0} (x) + G(x) u \end{align}\tag{5}
x˙=f0(x)+G(x)u(5)
这是连续性系统方程的一种特殊的形式,控制输入通过仿射矩阵
G
G
G来直接作用于系统。对于单摆系统来说,
f
0
(
x
)
=
[
θ
˙
−
g
l
sin
(
θ
)
]
G
(
x
)
=
[
0
1
m
l
2
]
(6)
\begin{align} f_{0}(x) = \begin{bmatrix} \dot{\theta} \\ - \frac{g}{l} \sin(\theta) \end{bmatrix} \ \ \ G(x) = \begin{bmatrix} 0 \\ \frac{1}{ml^2} \end{bmatrix} \end{align}\tag{6}
f0(x)=[θ˙−lgsin(θ)] G(x)=[0ml21](6)
ps:课上教授提到,如果系统存在一些u和x的复杂耦合关系使系统无法写成这种标准形式,仍然可以通过一些数学上的trick,通过引入新的状态 x x x,这个x中包含有原本的 x x x和 u u u中的耦合部分,则可以变换成这种控制仿射系统。
机械臂系统方程
搞机械臂相关的同学肯定不会陌生下面这种形式的系统方程(可以有许多种表达式,但都是等价的)。
M
(
q
)
v
˙
+
C
(
q
,
u
)
=
B
(
q
)
u
(7)
\begin{align} M(q) \dot{v} + C(q,u) = B(q) u \end{align}\tag{7}
M(q)v˙+C(q,u)=B(q)u(7)
其中,
M
(
q
)
M(q)
M(q) 是系统的质量矩阵,
C
(
q
,
u
)
C(q,u)
C(q,u) 是dynamics bias (科氏力和重力),
B
(
q
)
B(q)
B(q) 是输入矩阵,
q
q
q 是configuration,
v
v
v 是速度。
v
v
v不一定是
q
q
q的导数,它们可能存在如下关系
q
˙
=
G
(
q
)
v
(8)
\begin{align} \dot{q} = G(q) v \end{align}\\\tag{8}
q˙=G(q)v(8)
对于上述单摆系统,
M
(
q
)
=
m
l
2
M(q) = ml^2
M(q)=ml2,
C
(
q
,
u
)
=
q
l
sin
(
θ
)
C(q,u) = q l \sin(\theta)
C(q,u)=qlsin(θ),
B
=
I
B=I
B=I,
G
=
I
G=I
G=I。
ps:课上教授说,所有的机电系统都可以描述成这种形式,因为这是牛顿-欧拉方程的特殊表达方式而已。还不太理解。
线性系统
线性系统具有如下形式
x
˙
=
A
(
t
)
x
+
B
(
t
)
u
(9)
\begin{align} \dot{x} = A(t) x + B(t) u \end{align}\tag{9}
x˙=A(t)x+B(t)u(9)
由于线性系统控制理论相较来说已经比较成熟了,因此我们通常将一个具有通用形式的(1)系统在当前状态处线性化,则有
A
=
∂
f
∂
x
A = \frac{\partial f}{\partial x}
A=∂x∂f and
B
=
∂
f
∂
u
B = \frac{\partial f} {\partial u}
B=∂u∂f。
平衡点
平衡点的定义是,系统状态的变化量为0,因此如果系统处于该状态,那么将一直保持于此。
x
˙
=
f
(
x
,
u
)
=
0
(10)
\begin{align} \dot{x} = f(x,u) = 0 \end{align}\tag{10}
x˙=f(x,u)=0(10)
代数上这就是一个求根的问题。我们将单摆系统的状态方程带入(在输入
u
u
u为0时),
x
˙
=
[
θ
˙
−
g
l
sin
(
θ
)
]
=
[
0
0
]
(11)
\begin{align} \dot{x} = \begin{bmatrix} \dot{\theta} \\ -\frac{g}{l} \sin(\theta) \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \end{bmatrix} \end{align}\tag{11}
x˙=[θ˙−lgsin(θ)]=[00](11)
可以得到在
θ
=
0
,
π
\theta=0,\pi
θ=0,π 和
θ
˙
=
0
\dot{\theta}=0
θ˙=0时是系统的平衡点。
ps:通过提供系统输入u,可以改变系统平衡点,如我们令 u = m g l u=mgl u=mgl,则系统的平衡点会变到 π / 2 \pi/2 π/2。注意这个u只是说,当系统状态处于那个点时,我们提供这种输入可以让系统状态在该点平衡,而不是说,我只要一直提供这种u,就可以把系统状态转移到这个平衡点。
平衡点的稳定性
一个稳定的平衡点,在该点处受到微小的扰动后,应该是能够重新回到该平衡点的,考虑一维下的情况,一个3次多项式的系统方程。
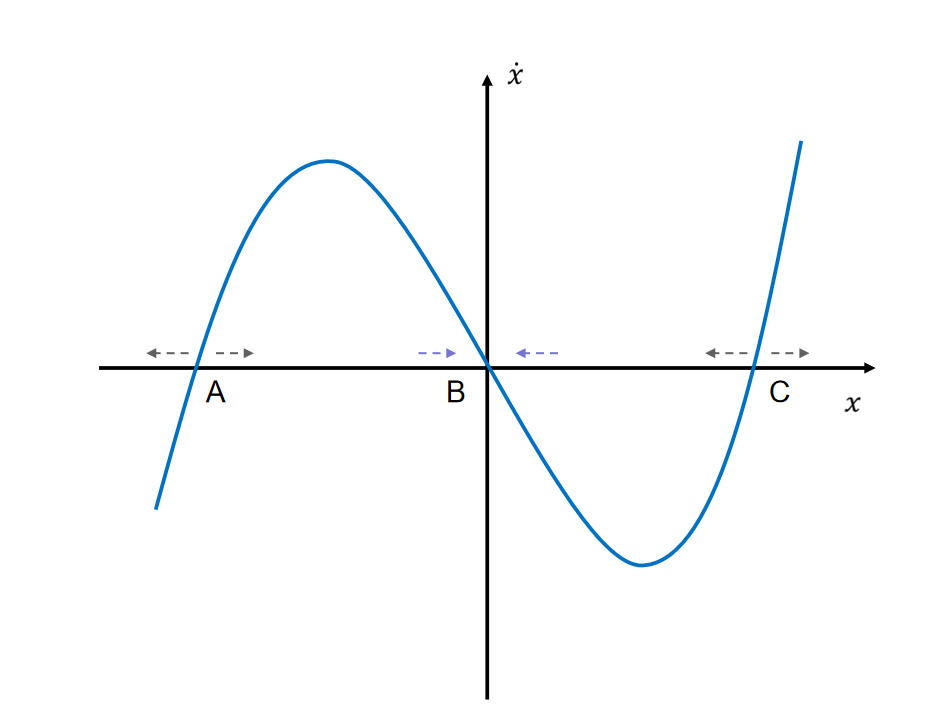
可以看出,从左到右系统有 A B C A\ B\ C A B C三个平衡点,在B点时,若我们将其扰动到相平面右边,从曲线中可以看出,此时系统的 x ˙ \dot{x} x˙是负的,因此此时 x x x会变小,则会回到相平面的原点。反观 A C A \ C A C点,当我们向右扰动时, x ˙ \dot{x} x˙为正, x x x就有了继续往右走的趋势,因此无法回到平衡点,这两个平衡点即是不稳定的。
进一步地,我们可以总结,当平衡点处 ∂ f ∂ x < 0 \frac{\partial f}{\partial x}<0 ∂x∂f<0 时,平衡点是稳定的,反之则不稳定。
在高维的情况,
∂
f
∂
x
\frac{\partial f}{\partial x}
∂x∂f是一个雅可比矩阵,为了分析此时系统的稳定性,我们可以通过找到一组坐标线性变换方式(coordinate transformation),将系统的所有状态转化成独立的,则将n维系统转成n个独立的系统。而这一步就是对系统的雅可比矩阵进行特征值分解,分解后每个特征向量对应的特征值则是对应子系统的梯度值。因此,对于高维系统而言,平衡点稳定的条件是
∂
f
∂
x
θ
=
π
=
[
0
1
g
l
0
]
⟹
e
i
g
(
∂
f
∂
x
θ
=
π
)
=
±
g
l
(12)
\begin{align} {\frac{\partial f}{\partial x}}_{\theta=\pi} = \begin{bmatrix} 0 & 1 \\ \frac{g}{l} & 0 \end{bmatrix} \implies eig({\frac{\partial f}{\partial x}}_{\theta=\pi}) = \pm \sqrt{\frac{g}{l}} \end{align}\tag{12}
∂x∂fθ=π=[0lg10]⟹eig(∂x∂fθ=π)=±lg(12)
注:这一块的分析是一些有关线性系统理论的知识。看到这里时回想起大四上线性系统理论时候被支配的恐惧。
在单摆系统中,我们有
f
(
x
)
=
[
θ
˙
−
g
l
sin
(
θ
)
]
⟹
∂
f
∂
x
=
[
0
1
−
g
l
cos
(
θ
)
0
]
(13)
\begin{align} f(x) = \begin{bmatrix} \dot{\theta} \\ - \frac{g}{l} \sin(\theta) \end{bmatrix} \implies \frac{\partial f}{\partial x} = \begin{bmatrix} 0 & 1 \\ - \frac{g}{l} \cos(\theta) & 0 \end{bmatrix} \end{align}\tag{13}
f(x)=[θ˙−lgsin(θ)]⟹∂x∂f=[0−lgcos(θ)10](13)
在平衡点
π
\pi
π处,
⟹
∂
f
∂
x
θ
=
π
=
[
0
1
g
l
0
]
⟹
e
i
g
(
∂
f
∂
x
θ
=
π
)
=
±
g
l
(14)
\begin{align} \implies {\frac{\partial f}{\partial x}}_{\theta=\pi} = \begin{bmatrix} 0 & 1 \\ \frac{g}{l} & 0 \end{bmatrix} \implies eig({\frac{\partial f}{\partial x}}_{\theta=\pi}) = \pm \sqrt{\frac{g}{l}} \end{align}\tag{14}
⟹∂x∂fθ=π=[0lg10]⟹eig(∂x∂fθ=π)=±lg(14)
一定会有一个负的特征值,因此系统是不稳定的。这也符合我们的实际情况。
在平衡点0处,
⟹
∂
f
∂
x
θ
=
0
=
[
0
1
−
g
l
0
]
⟹
e
i
g
(
∂
f
∂
x
θ
=
π
)
=
0
±
i
g
l
(15)
\begin{align} \implies {\frac{\partial f}{\partial x}}_{\theta=0} = \begin{bmatrix} 0 & 1 \\ - \frac{g}{l} & 0 \end{bmatrix} \implies eig({\frac{\partial f}{\partial x}}_{\theta=\pi}) = 0 \pm i \sqrt{\frac{g}{l}} \end{align}\tag{15}
⟹∂x∂fθ=0=[0−lg10]⟹eig(∂x∂fθ=π)=0±ilg(15)
系统是临界稳定的。这意味着,假如在平衡点处给一点小扰动,那么单摆在没有空气阻力的情况下将会一直荡下去。
小结
Lecture 1和2的主线基本上是从一个最简单的单摆系统开始,介绍现代控制理论中的一些基本知识,与本科阶段我上过的课的内容差异不大。本节先介绍了连续系统的不同状态方程以及如何判断系统平衡点处的稳定性。平衡点的概念对于一个非线性系统的控制来说是比较重要的,因为我们可以在平衡点处对非线性系统进行线性化后再利用成熟的线性控制理论来求解复杂的非线性控制问题。

















 3127
3127

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









