






ros2bag记录的文件转成pcd格式
描述
Ubuntu22.04 humble
ROS2 bag记录的数据形式后缀是.db3 将他直接转换成.pcd文件
可以用这个代码进行转换https://github.com/xmfcx/rosbag2_to_pcd
mkdir -p ~/rosbag2pcd_ws/src
cd ~/rosbag2pcd_ws/src
git clone https://github.com/xmfcx/rosbag2_to_pcd.git
cd ~/rosbag2pcd_ws
sudo apt update
rosdep init
rosdep update
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo -DCMAKE_EXPORT_COMPILE_COMMANDS=1
编译完成后启动
source ~/rosbag2pcd_ws/install/setup.bash
ros2 launch rosbag2_to_pcd rosbag2_to_pcd.launch.xml
注意:
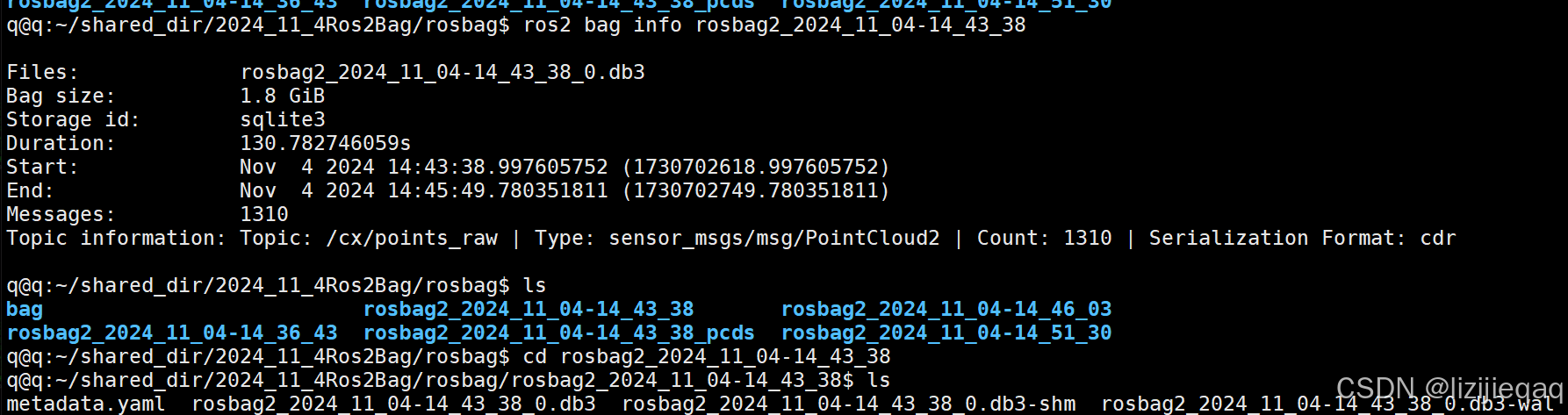
需要修改这个文件/rosbag2pcd_ws/src/rosbag2_to_pcd/config/rosbag2_to_pcd.param.yaml
将其中的path_bag修改成你的bag包的文件路径和topic_cloud修改成你的点云话题
vim /home/q/rosbag2pcd_ws/src/rosbag2_to_pcd/config/rosbag2_to_pcd.param.yaml
/**:
ros__parameters:
path_bag: /home/q/shared_dir/2024_11_4Ros2Bag/rosbag/rosbag2_2024_11_04-14_43_38
topic_cloud: /cx/points_raw

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









