







原理
参考代码
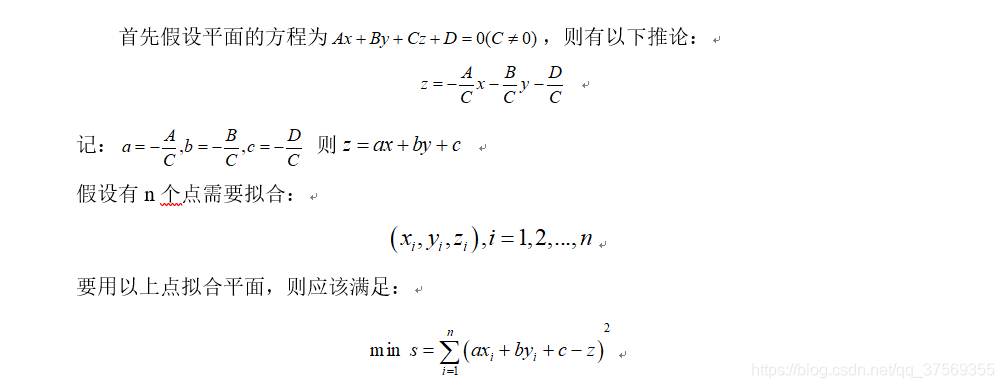
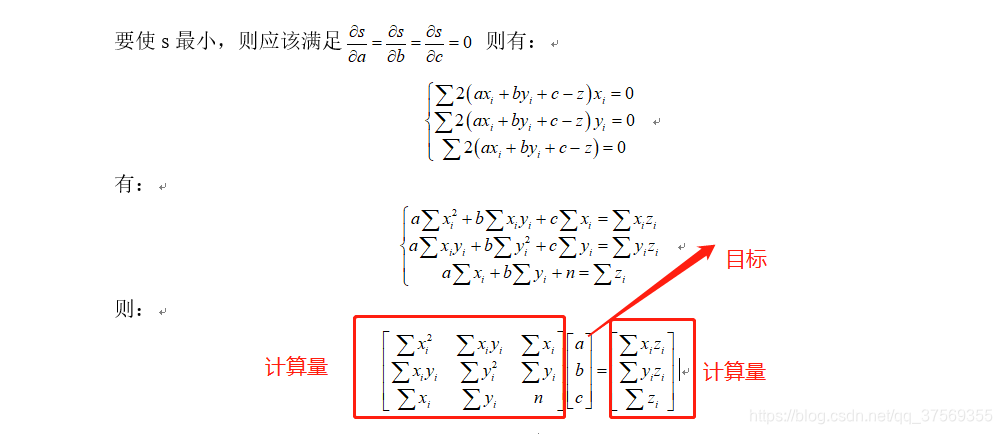
此处求解的平面方程为:z = ax + by + c
//作者:dwy
//日期:2019/07/09
// 用途:最小二乘拟合平面
#include<iostream>
#include<opencv.hpp>
#include<cmath>
using namespace std;
using namespace cv;
void creatTestData(vector<Point3f> &output)
{
RNG rng(12345);
int a = 10;
int b = 2;
int c = 5;
cout << "测试系数为:a=" << a << ",b=" << b << ",c=" << c << endl;
for (int i = 0;i < 10;i++)
{
double x = rng.uniform(1, 100);
double y = rng.uniform(100,200);
double z = a*x + b*y + c;
Point3f point;
point.x = x;
point.y = y;
point.z = z;
output.push_back(point);
}
}
void plane_fitting(vector<double>& coeffient, vector<Point3f> &input)
{
Mat dst = Mat(3, 3, CV_32F, Scalar(0));//初始化系数矩阵A
Mat out = Mat(3, 1, CV_32F, Scalar(0));//初始化矩阵b
for (int i = 0;i < input.size();i++)
{
//计算3*3的系数矩阵
dst.at<float>(0, 0) = dst.at<float>(0, 0) + pow(input[i].x, 2);
dst.at<float>(0, 1) = dst.at<float>(0, 1) + input[i].x*input[i].y;
dst.at<float>(0, 2) = dst.at<float>(0, 2) + input[i].x;
dst.at<float>(1, 0) = dst.at<float>(1, 0) + input[i].x*input[i].y;
dst.at<float>(1, 1) = dst.at<float>(1, 1) + pow(input[i].y, 2);
dst.at<float>(1, 2) = dst.at<float>(1, 2) + input[i].y;
dst.at<float>(2, 0) = dst.at<float>(2, 0) + input[i].x;
dst.at<float>(2, 1) = dst.at<float>(2, 1) + input[i].y;
dst.at<float>(2, 2) = input.size();
//计算3*1的结果矩阵
out.at<float>(0, 0) = out.at<float>(0, 0) + input[i].x*input[i].z;
out.at<float>(1, 0) = out.at<float>(1, 0) + input[i].y*input[i].z;
out.at<float>(2, 0) = out.at<float>(2, 0) + input[i].z;
}
//判断矩阵是否奇异
double determ = determinant(dst);
if (abs(determ) < 0.001) {
cout << "矩阵奇异" << endl;
return;
}
//Mat inv;
//invert(dst, inv);//求矩阵的逆
//Mat output = inv*out;//计算输出
//coeffient.clear();//把结果输出
//coeffient.push_back(output.at<float>(0, 0));
//coeffient.push_back(output.at<float>(1, 0));
//coeffient.push_back(output.at<float>(2, 0));
// 修改此处代码为SVD分解
Mat result = Mat(3, 1, CV_32F, Scalar(0));;
solve(dst, out, result, DECOMP_SVD);
coeffient.clear();//把结果输出
coeffient.push_back(result.at<float>(0, 0));
coeffient.push_back(result.at<float>(1, 0));
coeffient.push_back(result.at<float>(2, 0));
}
int main()
{
vector<double> coeffient;
vector<Point3f> input;
creatTestData(input);
plane_fitting(coeffient, input);
for (int i = 0;i < coeffient.size();i++)
{
cout << "第"<<i<<"个系数为:"<<coeffient[i] << endl;
}
cout << "hello,world" << endl;
return 0;
}
此处求解的平面方程为Ax+By+Cz=D
/*
*
*
* 最小二乘拟合平面,平面方程:Ax+By+Cz=D
* A = plane.at<float>(0,0)
* B = plane.at<float>(1,0)
* C = plane.at<float>(2,0)
* D = plane.at<float>(3,0)
*
* */
void fitPlane(const cv::Mat &points, cv::Mat& plane){
int rows = points.rows;
int cols = points.cols;
cv::Mat centroid = cv::Mat::zeros(1,cols,CV_32FC1);
for(int i=0;i<cols;i++){
for(int j=0;j<rows;j++){
centroid.at<float>(0,i) += points.at<float>(j,i);
}
centroid.at<float>(0,i)/=rows;
}
cv::Mat points2 = cv::Mat::ones(rows,cols,CV_32FC1);
for(int i=0;i<rows;i++){
for(int j=0;j<cols;j++){
points2.at<float>(i,j) = points.at<float>(i,j) - centroid.at<float>(0,j) ;
}
}
cv::Mat A,W,U,V;
cv::gemm(points2,points,1,NULL,0,A,CV_GEMM_A_T);
SVD::compute(A,W,U,V);
plane = cv::Mat::zeros(cols+1,1,CV_32FC1);
for (int c = 0; c<cols; c++){
plane.at<float>(c,0) = V.at<float>(cols-1,c);
plane.at<float>(cols,0) += plane.at<float>(c,0)*centroid.at<float>(0,c);
}
}















 542
542











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









