






2021.7.26
航天器集群:spacecraft cluster
航天器集群不需要严格的几何编队构型,他更多的强调系统各航天器之间的协同与合作,对相对运动动力学的要求降低为仅需保持有界性
J2摄动:由于地球不是规则的球形,因此造成了我们即便在只考虑地球和卫星两者之间的关系时也无法简单的将这个问题质点化,对于地球形状摄动只考虑J2项(二阶带谐系数)产生的影响
航天器集群的边界:构成集群的所有卫星在空间运动范围的极限
地心惯性坐标系(ECI)、相对轨道坐标系(LVLH)
内编队飞行:一个小卫星被包裹在另一个大卫星的腔体内构成的编队飞行方式
中心力场下物体的运动方程 r ¨ + g ( r ) r = 0 , s . t . r ( t 0 ) = r 0 , r ˙ = v 0 \ddot \boldsymbol {r}+ g(r)\boldsymbol{r}=0,s.t.\ \boldsymbol{r(t_0)}=\boldsymbol{r_0},\dot \boldsymbol r=\boldsymbol v_0 r¨+g(r)r=0,s.t. r(t0)=r0,r˙=v0
r \boldsymbol r r为位置向量, r = ∣ ∣ r ∣ ∣ r = ||\boldsymbol r|| r=∣∣r∣∣,g®为由势函数导出的力函数,且为标量函数。
密切轨道(吻切轨道或瞬时轨道)根数:在受摄运动下,某时刻的轨道根数。
平均轨道:密切轨道中消除短周期项、长周期项影响的轨道根数,只反映轨道根数的长期变化。
密切轨道根数和平均轨道根数的特性:只有使用瞬时根数才能计算卫星星历;在卫星轨道控制时,主要针对轨道根数的长期变化计算控制量;采用数值积分进行轨道积分计算,得到的是瞬时轨道根数。
地心惯性坐标系:不随地球自转
2021.7.27
卫星集群特点:一方面卫星集群不依赖星间相对测量信息,运行时成员卫星长期保持在一定的空间范围内,但并未规定精确的星间相位和距离联系,不必保持严格
的空间构型;另一方面卫星集群需具备长期自主运行能力,如长期自主导航、
长期运行轨道设计、长期自主轨道保持与碰撞规避等。
2021.7.28
博士论文《卫星集群导航与轨道控制方法研究》:
- 研究了多摄动影响下的平均轨道根数的动力学模型,并以平均轨道根数作为导航参数自主导航
- 用EKF和UKF进行平均轨道根数估计(导航),并将球形单边采样方法应用于平方根形式的UKF滤波
- 提出了卫星集群星间相对距离有界的初始轨道约束条件,提出了入轨后初始轨道建立方法(制导);为建立集群轨道,提出了基于环形控制策略的分布式轨道控制方法(控制)和基于改进高斯伪谱法的最优轨道控制方法。
- 提出了轨道保持方法和碰撞规避策略。当星间相对距离不能满足最远相对距离或最近相对距离约束时,利用星间相对关系、星间轨道根数关系,及最远、最近相对距离约束,提出了卫星集群轨道保持算法;提出了基于碰撞概率和基于相对距离的避让机动策略;考虑采用常值连续推力的情况提出了避让机动时间的约束;推导了避让规避后进行轨道控制的目标条件计算方法。
博士论文《航天器集群边界建模与控制方法研究》:
- 对航天器相对运动和集群运动的边界进行了建模。以航天器周期性相对运动方程为基础,基于极值原理推导得到了一对航天器间相对运动的坐标分量上下边界解析解,分析了一般周期性相对运动的星间距离极值规律,并进一步得到了绕飞相对运动和面内相对运动的星间距离上下边界解析解;以一对航天器间相对运动边界为基础,并基于包络盒和包络球的概念,建立了航天器集群的边界模型。
- 系统建立了航天器集群有界飞行的初始相对运动条件。
- 系统提出了满足集群飞行有界性条件的初始化控制方法。
- 建立了航天器集群的边界重构方法。其中,第一步实现期望边界到从星期望轨道根数的映射,第二步实现从星当前轨道根数到期望轨道根数的映射。将轨道根数调节问题分解为面内控制和面外控制两个部分。
博士论文《航天器集群飞行维持与控制方法研究》:
- 研究了基于生交点赤经匹配的保持航天器间相对距离长期有界的初始条件。
- 通过匹配平均轨道根数,研究了通过改变平均轨道半长轴大小关系改变航天器间相对距离的变化趋势,实现长期相伴飞行的方法。
- 研究了在J2摄动影响下,航天器轨道半径的变化范围,并介绍了两航天器间相对距离周期性变化的充分条件。在两航天器共赤道面的情况下,研究了施加单次冲量控制即可实现相对距离长期有界的条件。
- 针对航天器集群严格构形保持的控制问题,研究了模拟物理系统的虚拟弹簧阻尼网络控制方法。
面质比:卫星质量与横截面积的比值。卫星质量越大,表示卫星的惯性越大,横截面积越小,表示卫星受到的大气阻力越小,因此面质比越小表示卫星的在轨寿命越长,反之越短。
2021.7.29
M = E - esinE
《一种基于自适应种群变异鸽群优化的航天器集群轨道规划方法》:解决的主要问题是航天器之间的避障问题。采用的算法是题目中的那几个关键词。
《集群航天器相对状态保持多约束鲁棒控制研究》:解决了航天器相对状态保持问题,主要从姿态控制和轨道控制两方面解决这个问题,使用了人工势场法进行轨道控制,使用滑模控制方法进行姿态控制。
《集群航天器球形边界控制》:提出了集群航天器在蜂拥控制下的边界问题,研究了球形边界参数的优化性能指标,并使用粒子群算法对实现了集群的最小边界搜索.并依据搜索结果设计了一种基于球形势函数的边界控制方法。
2021.7.30
半长轴semimajor axis,
偏心率eccen-tricity,
轨道倾角inclination,
升交点赤经right ascension of the ascending node,
近地点角距argumentof perigee,
维度平均幅角 mean argument of latitude(
u
=
w
+
M
u=w+M
u=w+M)
平近点角M:mean anomaly
相对轨道要素(ROEs)
绝对轨道要素(AOEs)
2021.8.2
偏近点角(E)、真近点角(T)和平近点角(M)之间的关系:

绝对轨道要素和相对轨道要素之间的转换关系一阶展开:
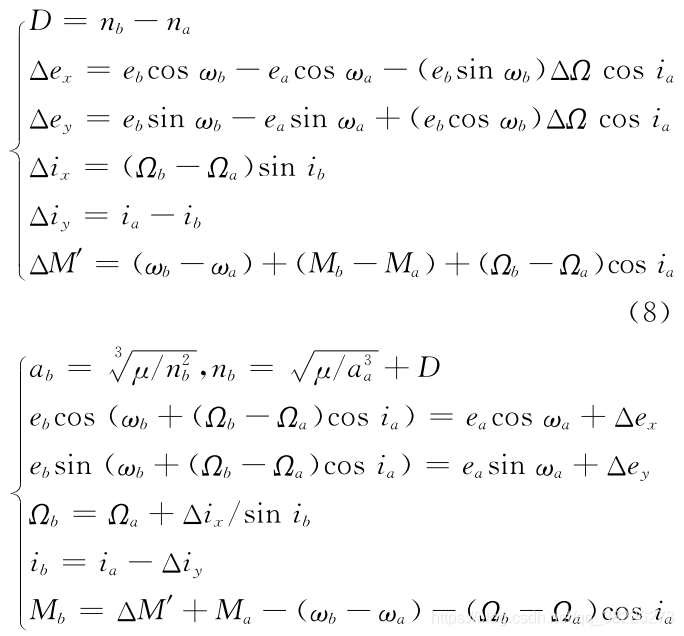
伴随卫星在基准卫星的质心轨道坐标系下的运动方程为(参考 :基于相对轨道要素的椭圆轨道卫星相对运动研究 . 韩潮):
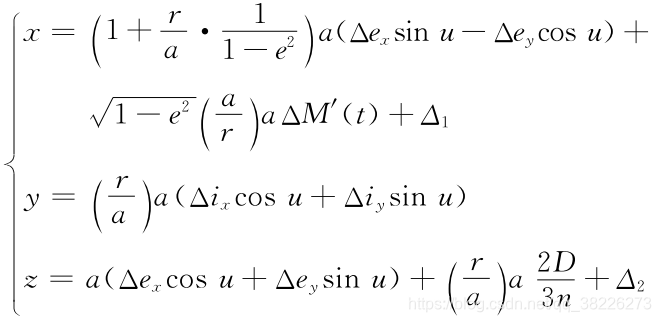
《基于相对轨道要素的椭圆轨道卫星相对运动研究》,韩潮:详细推导了相对轨道要素和绝对轨道要素之间的转换关系,使用相对轨道要素推导了卫星相对运动方程和相对速度方程,统一了椭圆轨道和近圆轨道相对运动方程,并基于方程分析了卫星之间的相对运动
GEO(Geosynchronous Eearth Orbit):地球静止轨道卫星
IGSO(Inclined Geosynchronous Satellite Orbit):倾斜轨道同步卫星
MEO(Medium Earth Orbit):中高轨卫星
LEO(Low Earth Orbit):低轨卫星
2021.8.3
《Cluster flight orbit design method for fractionated spacecraft》Wang, Jihe
:本文解决了航天器集群轨道设计问题,该问题假设主卫星处于圆形或近圆形的低地球轨道(LEO),并满足以下三个设计要求:最小的燃料消耗、无被动碰撞特性和最大的相对距离约束。为满足这三个要求提出了三个约束条件(三个条件的自变量是和相对EI矢量的x\y轴分量有关的),又提出了一个目标函数得到了一个非线性规划问题,然后提出了三个解决此问题的方法。
《基于 Simulink /Stateflow 的小卫星姿态 控制模块设计与仿真研究》, 吕 波,曾国强:本文首先给出了小卫星姿态动力学模型,然后使用PD控制进行姿态控制,基于PD控制推导出了三轴力矩的输入表达式
2021.8.4
《Cooperative Tracking Control for Formation Keeping of Fractionated Spacecraft Based on Error Exchanging》, Niu, Ya Feng:本文介绍了使用协同跟踪控制方法进行相对轨道保持,使用HILL方程作为集群航天器相对轨道动力学模型,结合了一致性理论和滑膜控制方法作为控制率,并使用李雅普诺夫理论证明了系统稳定性。
集群航天器:spacecraft cluster
模块化航天器:fractionated spacecraft
卫星集群:satellite cluster
《卫星集群系统的应用现状与发展动态》, 闻新:本文力图打造一篇分布式卫星集群应用的最新综合分析报告。
2021.8.5
拉格朗日行星运动方程
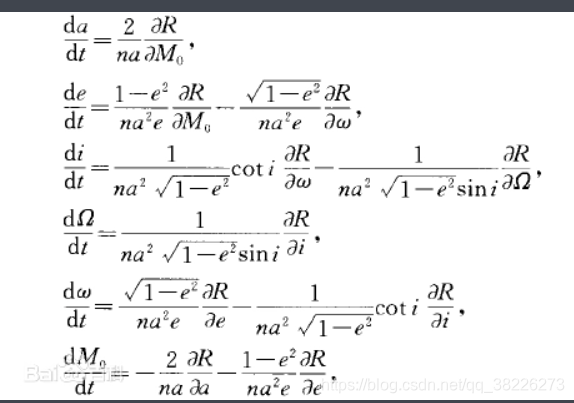
高斯型受摄运动方程:见《航天器轨道力学理论与方法》第191页。
2021.8.9
《大规模微小卫星集群的包容控制》,卢晓东:运用一阶一致性控制率和二阶一致性控制率使跟随卫星群运动到领航者卫星群围成的凸包内。
《基于电磁力的集群航天器构形维持自抗扰控制》,杨茗棋:本文的相对动力学模型是用HILL方程建立的,不过由于电磁力为内力,所以HILL方程的坐标系选的是集群系统的质心,然后建立了基于电磁力的相对运动学方程,然后设计了跟踪微分器、扩张状态观测器、ADRC控制器对航天器集群进行控制使其能够实现构型保持。
2021.8.10
Radial:径向:沿半径方向
Transverse:航向:前进方向
Normal:法向
《微纳卫星相对轨道机动控制技术研究》,孙书剑著:本文结合一个实际工程,实现了一个卫星从远距离接近另一个非合作目标卫星的过程。本文有一个亮点是它有对卫星的推力系统进行建模,本文的相对动力学模型是基于HILL方程建立的,在此基础上评估了LQR、ADRC和滑膜变结构控制方法在卫星相对运动控制上的优劣,并把这三种方法用到了远距离接近机动控制、中距离接近机动控制和近距离接近机动过程中。
2021.8.12
《Closed-loop distance-keeping for long-term satellite》,Leonel Mazal:本文讲了长期集群保持问题,没有领航者,本文推导出集群保持和卫星之间的轨道半长轴有关,并通过设计控制率来控制各个卫星的轨道半长轴来实现长期卫星集群保持问题。
2021.8.20
SAR卫星:合成孔径雷达卫星。它的成像机理与传统光学遥感不同:它们通过对目标物发射穿透性较强的电磁波,并快速接收回波信号。同时利用多普勒效应,通过对回波数据计算实现成像。
星间基线:两卫星质心连线。

















 475
475

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









