






本文图片来自:Yang, F., Feng, C., Chen, Z., Park, H., Wang, D., Dou, Y., ... & Wong, A. (2024). Binding touch to everything: Learning unified multimodal tactile representations. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (pp. 26340-26353).
早期的触觉传感器主要设计用于记录基本的低维感官输出,如力、压力、振动和温度。
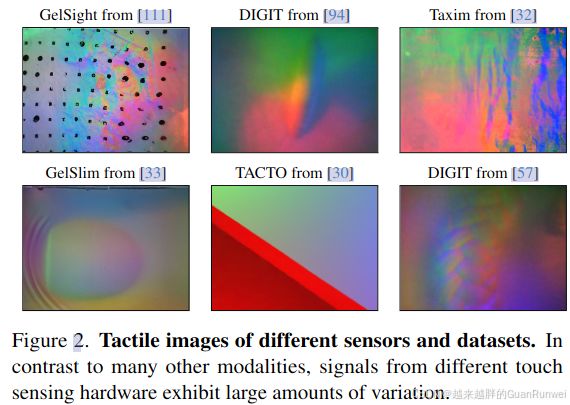
GelSight、DIGIT、Taxim、GelSlim 和 TACTO 这几种触觉传感器在结构、原理和应用上有所不同,导致它们传递的信号也有显著差异。以下是它们之间的一些主要区别:
-
GelSight
- 原理:GelSight 基于柔性传感器,利用软胶材料来接触物体,并通过图像传感器捕捉接触表面的变形。这种传感器通过表面形变的视觉信号来获取触觉信息。
- 信号传递:GelSight 主要通过视觉信号传递触觉信息,捕捉表面形变的图像。它通过高清相机实时获取触碰时表面变形的高分辨率图像,之后进行图像处理来提取物体表面的形状、纹理等特征。
- 差异:与其他触觉传感器不同,GelSight 使用视觉数据来传递触觉信号,因此它具有较高的分辨率和精度,但可能在实时反馈和柔性响应上有所局限。
-
DIGIT
- 原理:DIGIT 传感器是一种基于柔性电子技术的触觉传感器,利用电阻式或压电式传感元件来感知触摸和压力变化。
- 信号传递:DIGIT 通常通过电信号(电阻或电压变化)来传递触觉信号,信号强度与施加的压力或接触的表面形态相关。
- 差异:DIGIT 的信号通常基于直接的压力或应变变化,与 GelSight 的视觉信号不同,DIGIT 提供更直接的触觉反馈。
-
Taxim
- 原理:Taxim 传感器利用基于电容的技术来感知接触,并且能够检测触摸的具体位置、压力和表面特征。
- 信号传递:Taxim 通过电容信号来传递触觉信息,这种信号可以反映出触摸的细节,如触摸强度、位置精度等。
- 差异:与 DIGIT 和 GelSight 类似,Taxim 也基于压力或接触,但它的精度和信号传输机制通过电容技术来增强对触摸细节的感知。
-
GelSlim
- 原理:GelSlim 传感器与 GelSight 相似,但其设计更加轻薄,便于灵活应用。它同样使用软材料来捕捉物体表面的变形。
- 信号传递:GelSlim 通过图像处理来捕捉表面形变,通常具有较低的分辨率和较简化的图像处理算法,相比 GelSight,它适用于对硬件尺寸要求较高的场景。
- 差异:GelSlim 在尺寸上更为紧凑,适用于空间受限的应用场景,信号传递也偏向于简化版的 GelSight。
-
TACTO
- 原理:TACTO 是一种触觉反馈装置,通常用于虚拟现实(VR)和增强现实(AR)等领域。它结合了多种触觉反馈机制,包括振动、压力等。
- 信号传递:TACTO 通过电动振动元件、压力传感器和温度传感器等多种方式传递触觉信号,能够提供复杂的触觉反馈。
- 差异:TACTO 更加侧重于多维度的触觉反馈,能够同时模拟多个感觉(如温度、震动和压力),与其他传感器相比,TACTO 的信号传递更为丰富和多样化。
总结
- GelSight 和 GelSlim:主要依赖视觉反馈,捕捉物体表面变形的图像信息,适用于高精度、低延迟的触觉感知。
- DIGIT 和 Taxim:基于电阻或电容传感,侧重于直接的压力或接触信号传递,适用于灵敏的触觉感知。
- TACTO:结合多种触觉反馈机制,提供复杂的触觉信号传递,适用于虚拟现实和增强现实中的触觉模拟。
这些传感器在不同应用场景中有不同的优势,信号传递的方式也根据其技术原理有所差异。


















 487
487

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











