








 本文详细介绍了控制系统中稳态误差的概念和计算方法。稳态误差分为静态误差和动态误差,与系统的型别和输入信号类型有关。通过静态误差系数法,可以快速计算不同输入下的稳态误差。积分环节在系统中起到关键作用,能够影响系统的跟随能力,足够的积分环节可使系统达到无差状态,而积分环节不足会导致稳态误差增加。理解这些概念有助于设计和分析控制系统的性能。
本文详细介绍了控制系统中稳态误差的概念和计算方法。稳态误差分为静态误差和动态误差,与系统的型别和输入信号类型有关。通过静态误差系数法,可以快速计算不同输入下的稳态误差。积分环节在系统中起到关键作用,能够影响系统的跟随能力,足够的积分环节可使系统达到无差状态,而积分环节不足会导致稳态误差增加。理解这些概念有助于设计和分析控制系统的性能。
【自控笔记】3.2 稳态误差计算
一、误差与稳态误差
通常把在阶跃输入作用下没有原理性稳态误差的系统称为“无差系统”,而把有原理性稳态误差的系统误差称为“有差系统”。
1、误差
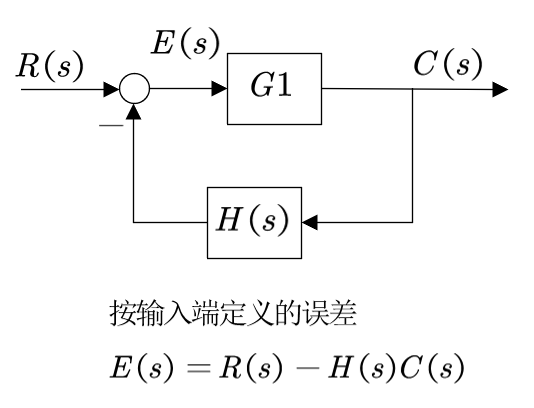
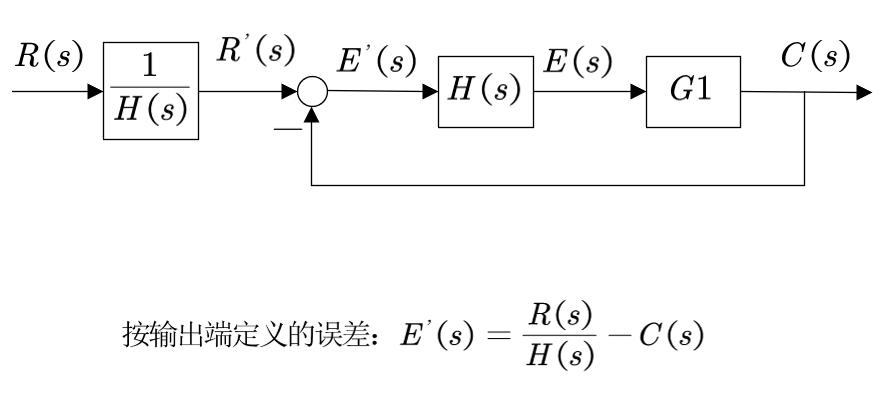
误差可以从输入端或者输出端出发进行定义,如下图所示,按输出端定义的系统结构图只是按输入端定义结构图的等效变换,误差表现为多除以了一个H(s)。
按输出端定义的误差,比较接近理论意义上的误差,但往往不可测量。而按输入端定义的误差通常是可测量的,且具有一定的物理意义。
2、稳态误差
如下图所示,稳态误差分为静态误差和动态误差。通俗来讲,静态误差就是一个时间趋于无穷时的一个误差值,而动态误差随时间的变化而变化,是一个描述误差变化的函数。
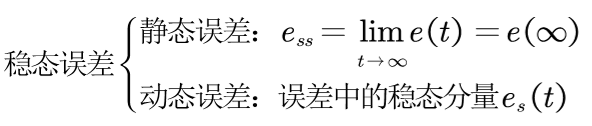
动态误差的求解思路可以先求出E(s), 再对其进行泰勒展开,最后使用拉氏反变换求得动态误差。
二、稳态误差计算
稳态误差与自身的结构参数有关,与外作用的类型有关。稳态误差等于由输入引起的误差与由扰动引起的误差之和。
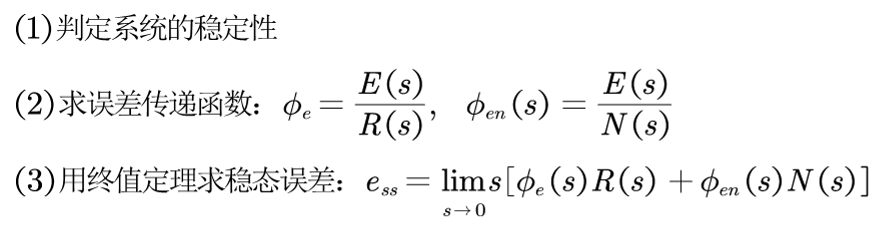
1、一般法
稳态误差是在系统稳态的前提下讨论的,所以在求解稳态误差的时候,必须先保证系统是稳定的。
2、静态误差系数法
经过计算不同输入信号下的系统稳态误差可整理如下表格所示,记住表格的就可以快速解决问题了。
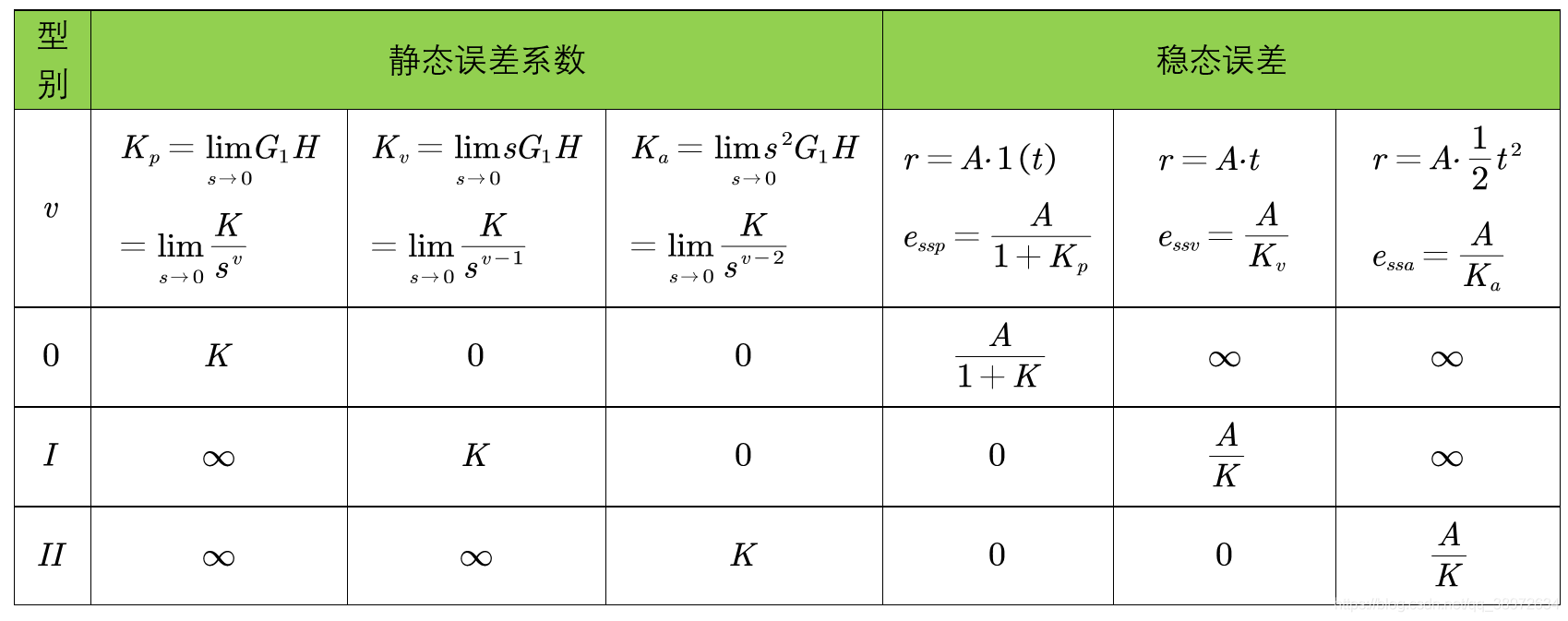
根据卢京潮老师的课程(感谢卢老师!!!),记住这个表格可以用四句话描述:
①一个系统的型别确定后,它的稳态误差随着输入“档次”的提高而增加
②当一个系统的输入确定后,它的稳态误差随着系统型别的增加而降低
③当型别与“档次”对等时,它的稳态误差是一个非0常值
④若系统的型别高而输入“档次”低,则稳态误差为0;反之为无穷。
当然也可以借助线性代数的三角矩阵记忆。
那这个表格是怎么来的呢?
我们以按输入端定义的误差(在上文)结构图来推导,如下所示:
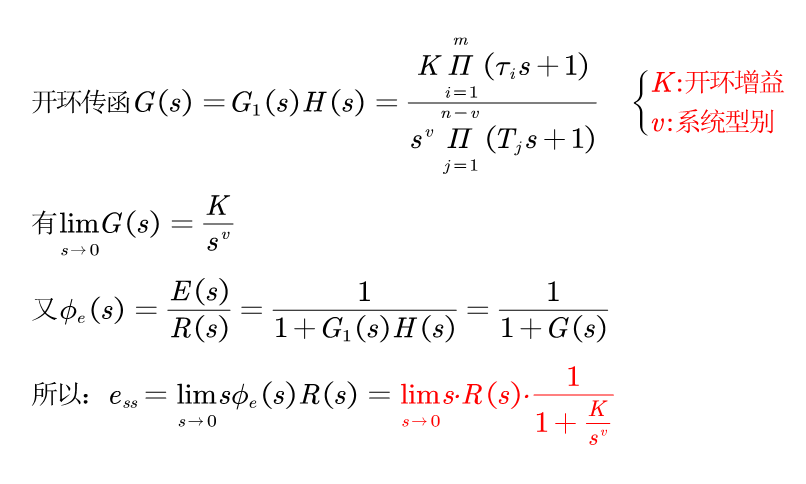
将R(s)代入即可得到相应的稳态误差。懂得推导后,其实也不需要记住表格了,只要记住稳态误差表达式,代入输入和系统型别就好了。
2.1积分环节对系统稳态误差的影响
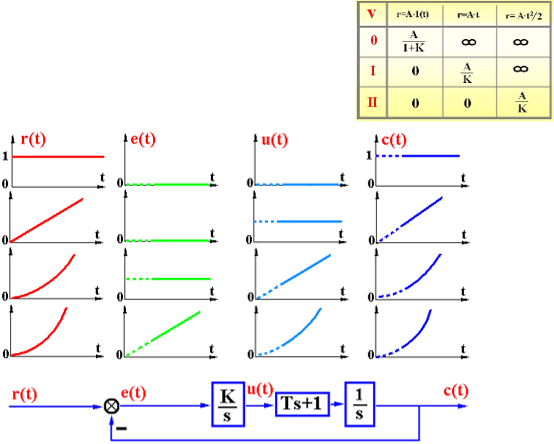
这里借用卢老师的一页PPT来说明积分环节对于稳态误差的影响。
如下图一个II型系统(系统稳定),开环增益为K。
①在阶跃输入下的稳态输出是一个常值,说明u(t)为零,积分才能是一个不变的常值,所以稳态误差为0。
②在速度输入下的稳态输出是一个线性函数,说明u(t)是一个常值,所以e(t)为零。
③同理,在加速度输入下,该系统的e(t)是一个常值。
④随着输入的阶数提高,这个只有两个积分环节的二阶系统不能够阻止e(t)的增大,从而稳态误差趋向于无穷。
所以积分环节体现了系统对输入信号跟随能力,每一个积分环节的输出都是对前一个输入信号的累加,
当积分环节足够时,系统输出总是以一个稳定的误差(0或者常数)对输入信号进行跟随;
当积分环节不够时,稳态误差就不再是一个常数,而是随着时间的流逝而趋于无穷了。

















 8333
8333

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









