







树莓派使用之Ubuntu-mate
前言:上一次写的时候是因为Raspberry Pi 4B 8G版本(2020/7/28),隐约记得是因为Ubuntu-mate没有对新的大内存进行优化所以开机就闪退,这次先拿Raspberry Pi 4B 4G版本写一次Ubuntu-mate的教程,很多步骤在这里更详细了,虽然烧录这些可能真的异常简单… 但是本着记录的原则我还是都写下来吧,
测试环境:树莓派4B 4G ubuntu-mate 20.04,但是其他版本的也是一样的操作,换源那里注意一下就好了
烧录镜像至SD卡
下载镜像
官方镜像下载地址 Ubuntu-mate
2021年1月7日下载的 上传到了百度云->提取码:33nz
烧录SD卡
balenaEtcher软件下载地址
官方 往下滑可以看见关于系统选择的下载 但是应该会很慢
2021年1月7日下载的 上传到了百度云 提取码:ev19
插入自己的电脑,打开balenaEtcher软件,如下GIF:

烧录完成:
将SD插入树莓派
实物GIF

安装流程
这里的安装流程真的… 不用说因为不像给双系统或者主机安装ubuntu还得设置分区啥的,这个就直接没有那一步,该填啥填啥直接下一步,下一步,等待安装完成即可【我本来还录了个视频 但是发现… 没啥用】
但是这里申明两点:
1.如果发现频繁闪退,关机 -> 换SD卡 -> 烧录树莓派官方系统
2.第一条如果没有成功 恭喜你可能是树莓派硬件出了问题,不要犹豫直接问淘宝寄回返修 【千分之一的几率没错就被我碰到过】
树莓派开机
sudo reboot
如果发现自己没有WIFI连接就是搜索不到WIFI 执行重启操作,重启后你就能看到了WIFI列表了
sudo reboot
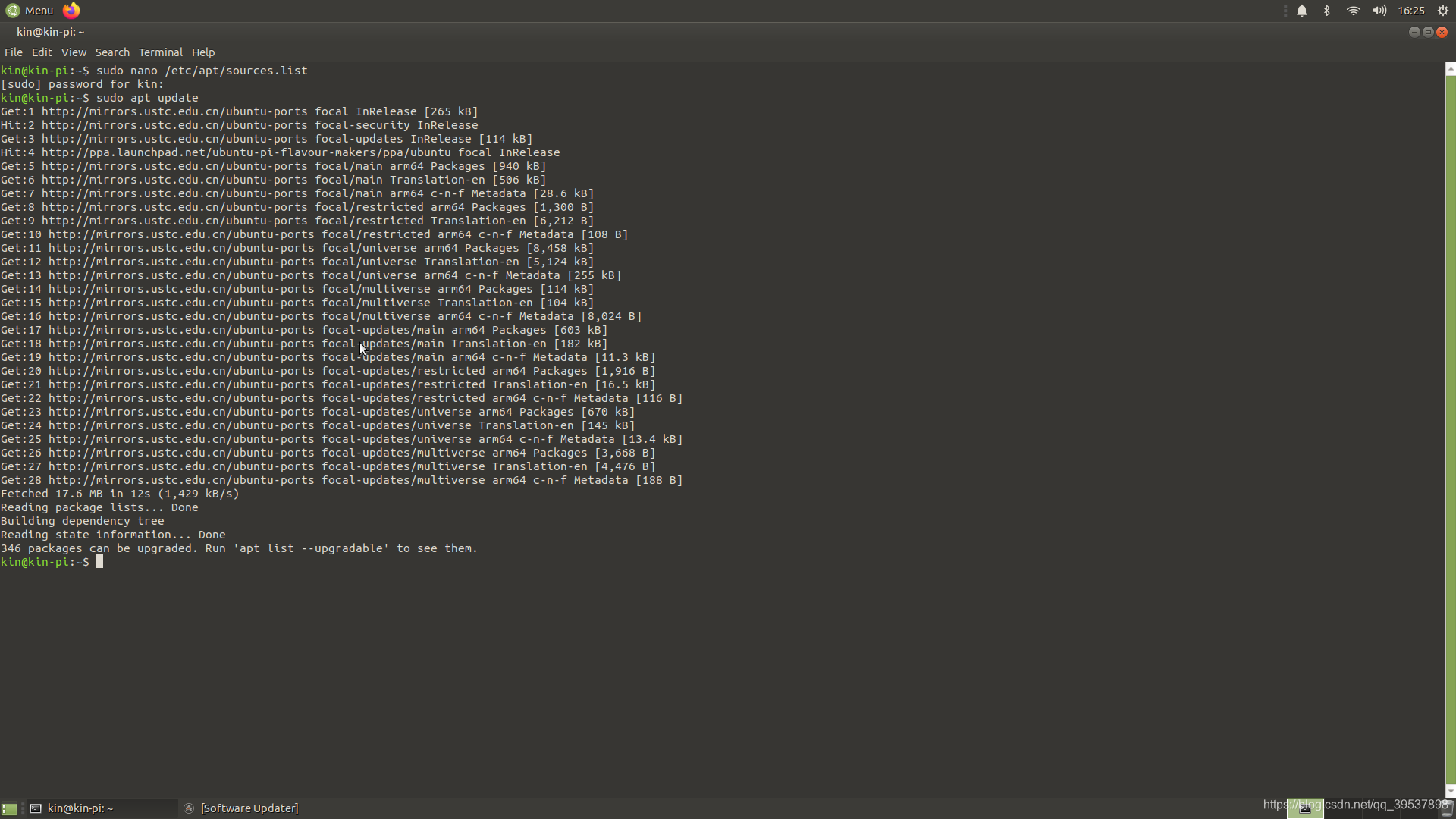
换源
这一步无论哪个版本都是一样的 注意看一下focal网址后面的这个,象征着Ubuntu的版本 所以可以只复制网址替换原来的也行
sudo nano /etc/apt/sources.list
将里面的内容替换为下面这些,#后面的是注释的官方的源
#deb http://us.archive.ubuntu.com/ubuntu/ focal main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ focal main restricted universe multiverse
#deb http://ports.ubuntu.com/ubuntu-ports/ focal-security main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ focal-security main restricted universe multiverse
#deb http://us.archive.ubuntu.com/ubuntu/ focal-updates main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ focal-updates main restricted universe multiverse
更新源内容,一定要换源后更新不然sudo apt install的命令还是走的主网站US那边的
sudo apt update
下载SSH
首先得下载net-tools
因为远程操作的话你要知道这个树莓派的IP地址,对于树莓派原生系统来说这些都是已经在系统离了的
sudo apt install net-tools

这条指令就可知道现在IP地址
ifconfig
下载openssh
但是树莓派官方的Pi OS同样也已经内嵌了SSH,无需下载
sudo apt install openssh-server
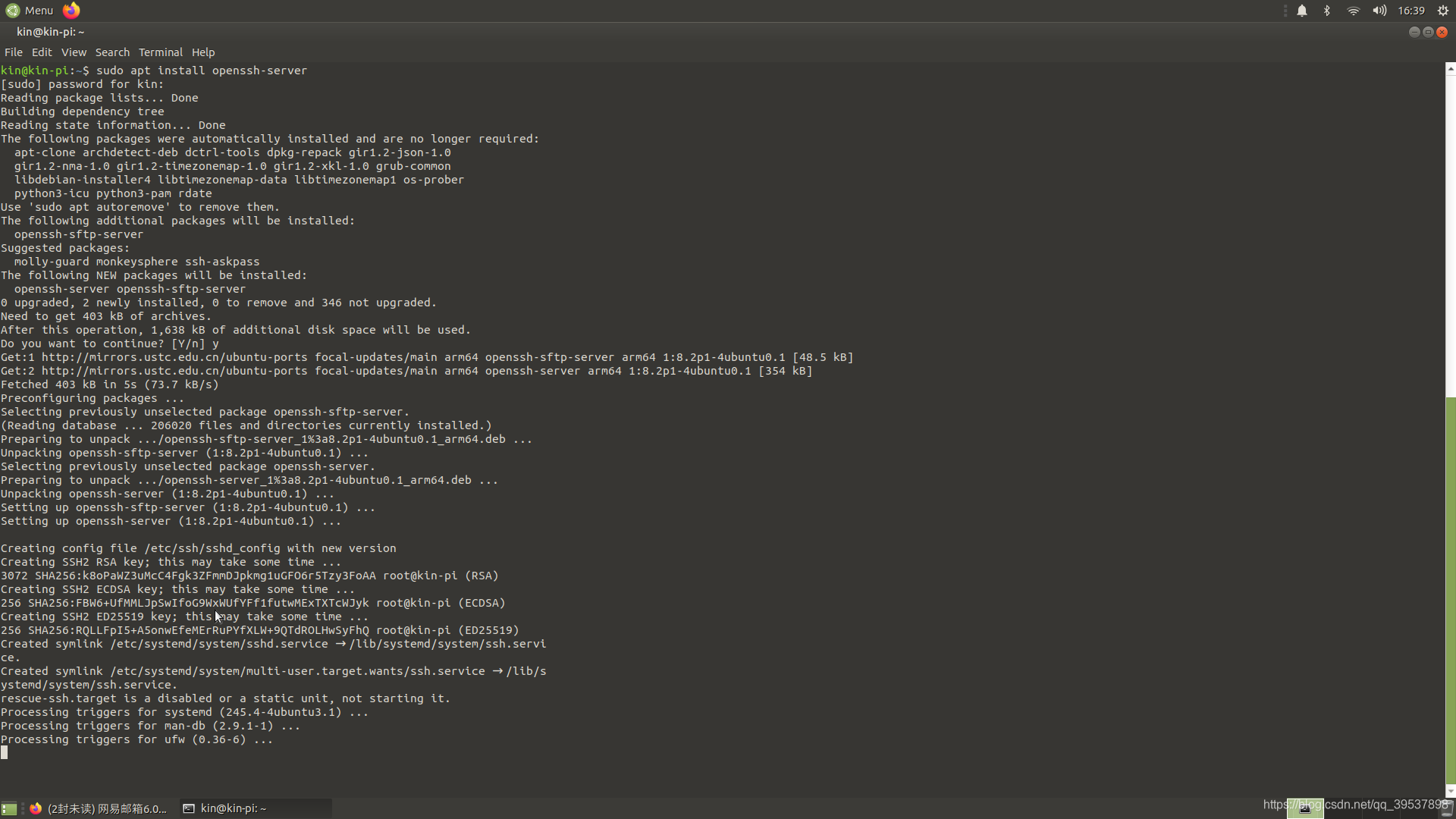
然后安装这个ubuntu-mate 20.04的树莓派就可以拿你的电脑连接了
电脑远程操作
下载 Xshell
设置远程
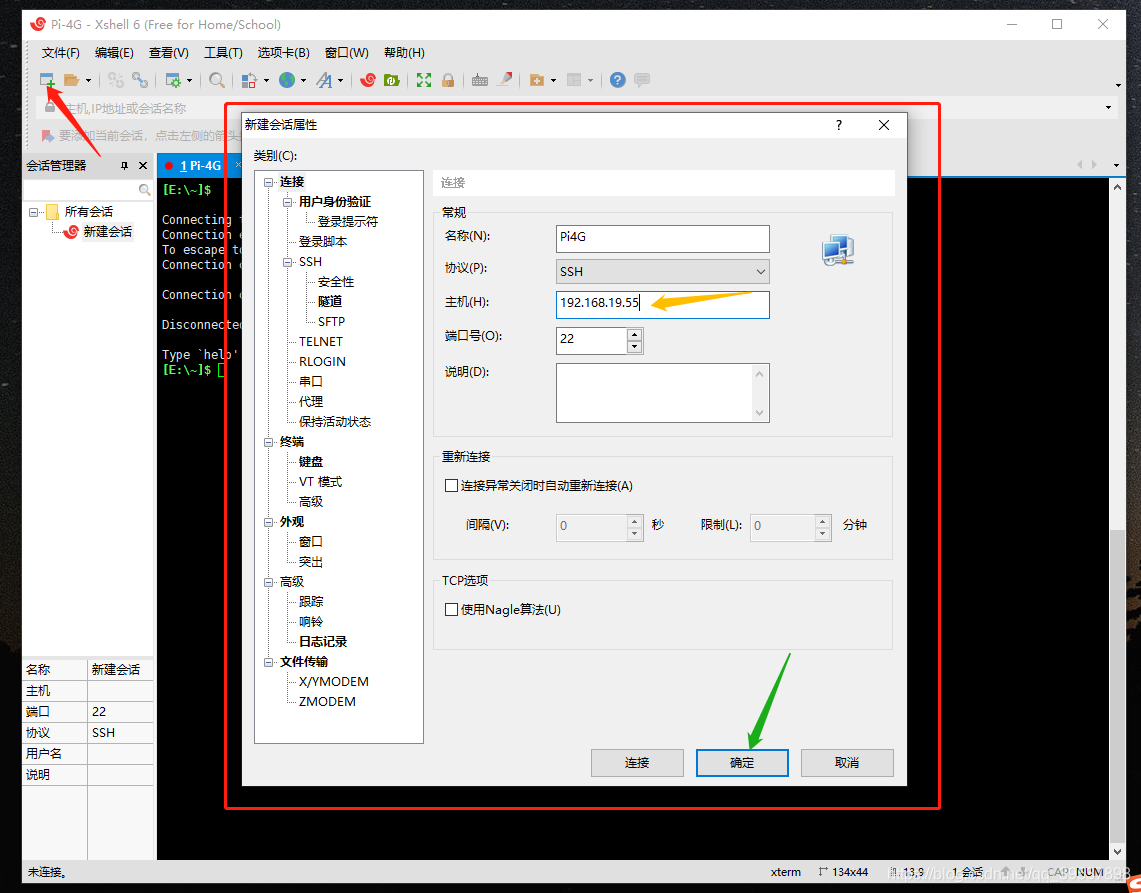
黄色的箭头就是你在树莓派看到的IP地址
然后剩下的就是用户名&密码(是你安装系统的时候设置的)
例如我的用户名就是:kin【然后看看上面截图 聪明的你一定发现了用户名在每一行命令的顶头会显示@前面的】
连接成功
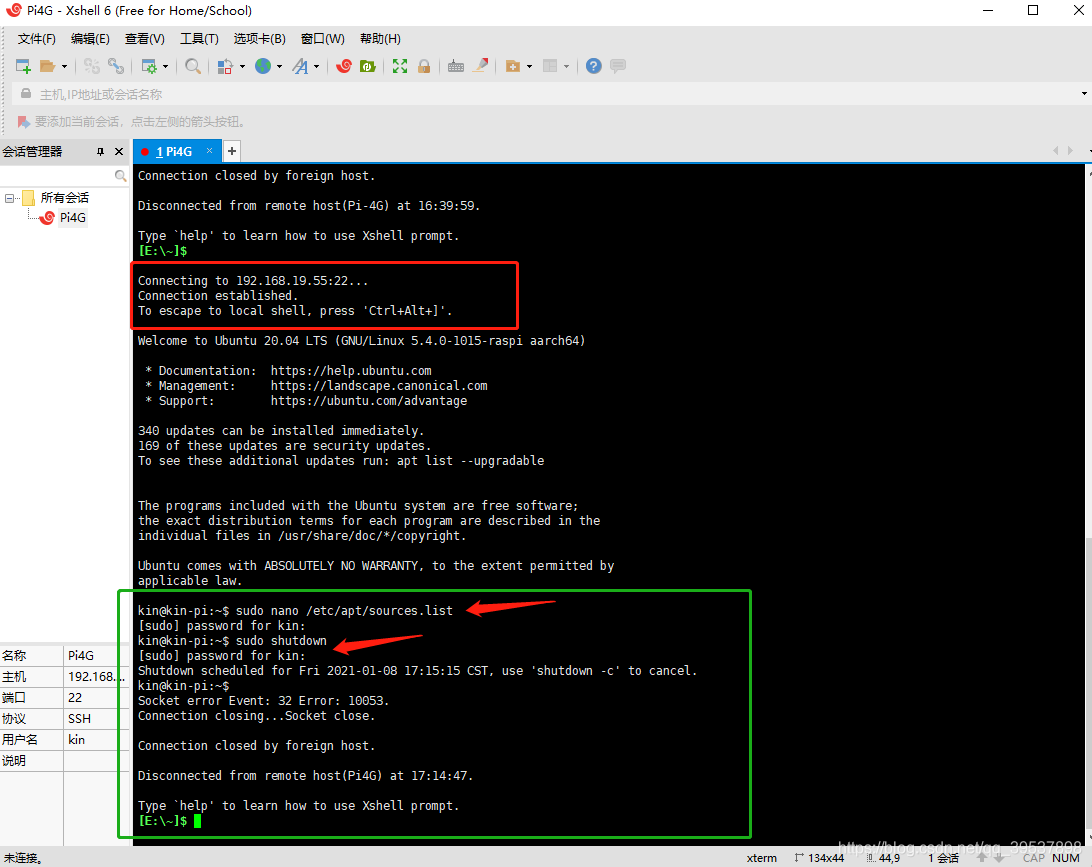
最后的箭头是shutdown关机操作哈 大家别直接对着就打上去了 hhh😂
安装ROS
添加ROS源和密钥
清华源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
更新
sudo apt update
安装ROS
sudo apt install ros-noetic-desktop-full

环境设置
source /opt/ros/noetic/setup.bash
将环境写入bashrc文件,后续就不需要每次都source了
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
小乌龟
roscore

rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
















 2590
2590











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











