







目标:以太网通讯、moveit能够控制机械臂、能通过ros控制机械臂
硬件环境:
UR10机械臂+polyscope3.14+noetic版本ros+ubuntu20.04
调试步骤:
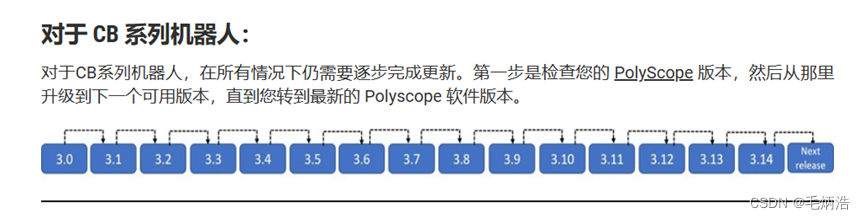
1、先检查UR机械臂的polyscope版本,需要urcap,没有不能外部控制,然后 安装externalcontrol-1.0.5.urcap插件
polyscope版本升级参考官网升级安装包:优傲机器人 - 传统下载中心 (universal-robots.com)
安装外部控制插件:External Control
2、下载官方的ROS包:
universal robot: (github.com)ROS-工业/universal_robot:ROS-工业优傲机器人支持
universal_robots_ros_driver:优傲机器人/Universal_Robots_ROS_Driver:(github.com)支持CB3和e系列的优傲机器人ROS驱动程序
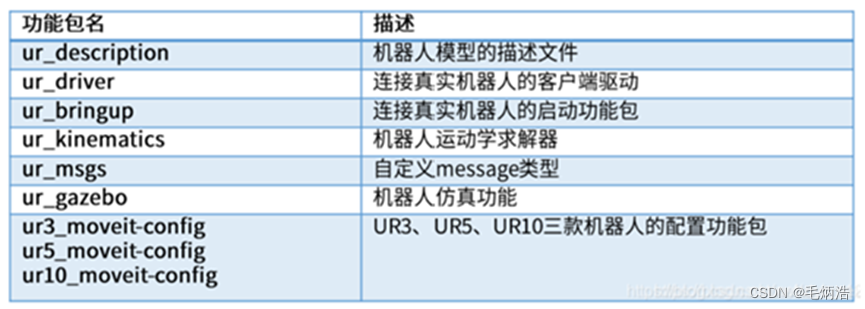
程序包含义
注:实测kinetic版本在noetic也可用。
3、在本地创建工作空间并编译功能包
创建ur10机械臂工作空间
mkdir -p ws_ur10/src
下载好的r官方ros功能包放入src文件夹中并编译工作空间
cd ws_ur10
catkin_make
注:首次编译会缺少依赖库,根据报错提示安装对应包即可。
4、修改电脑ip和ur机械臂ip相同并ping通,
①查看UR机械臂的IP地址,例:192.168.1.xx
②修改自己电脑ip和UR机械臂同一网段,192.168.1.xx
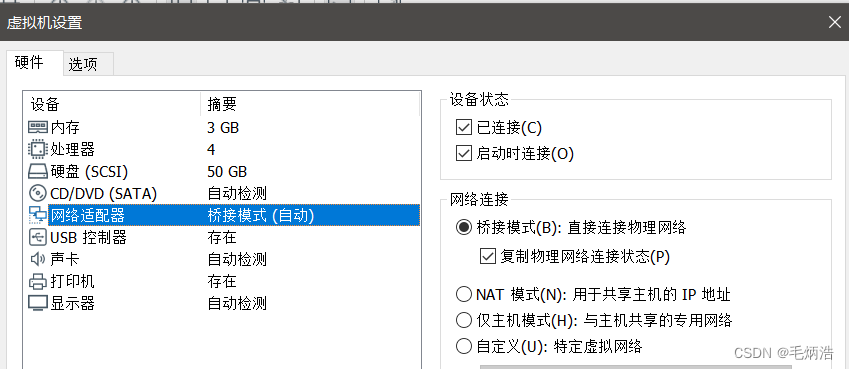
③如果是虚拟机,需要虚拟机网络设置为物理桥接模式,然后修改ip为同一网段,192.168.1.xx
④在ur机械臂urcap外部插件新建程序,并在设置中输入自己电脑的用户名和ip地址和端口号50002(使用hostname查看用户名)
参考URCap插件设置
5、运行功能包
①启动机械臂驱动程序:
roslaunch ur_robot_driver ur10_bringup.launch robot_ip:=192.168.1.83
注意:ur机械臂示教器需要启动externalcontrol插件并运行
出现robot connected…即机械臂和电脑链接成功
②启动moveit 轨迹规划节点
roslaunch ur10_moveit_config _moveit_planning_execution.launch
出现You can planning … 即为成功
③启动rivz可视化界面程序
roslaunch ur10_moveit_config demo.launch
拖动机械臂末端位置点,然后在motionPlaning栏中点击plan&execute机械臂执行轨迹运动
参考: ROS下UR机械臂控制配置_ur功能包github_翻滚的石子的博客-CSDN博客
机械臂移动测试程序
rosrun ur_robot_driver test_move.py

















 5800
5800











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











