







机械臂正逆解
由于贫穷的关系,只得在淘宝上购买“玩具”机械臂进行研究,这是下面这货:
2022年2月更:之前的这个求解方式对于姿态的约束是有一些问题的,此课程包含了修正后的3、4自由度机械臂的逆解推导与源码,有兴趣的可以了解一下

相信小伙伴都在淘宝上买了这个手臂来玩耍,但是这手跟工业传统的6轴机械臂那差了不是一点半点。找寻了半天也没有找到现成的DH模型和运动学逆解。所有就自己使用几何法建立了模型并给出运动学逆解。最后的控制效果可以观看视频:
下面是几何解过程,并附上C/C++的程序
经过我的分析,这个机械臂可以简化成一个4自由度的机械臂(夹子和夹子上的那两个舵机对运动学逆解无关),如下图:

画出几何示意图:
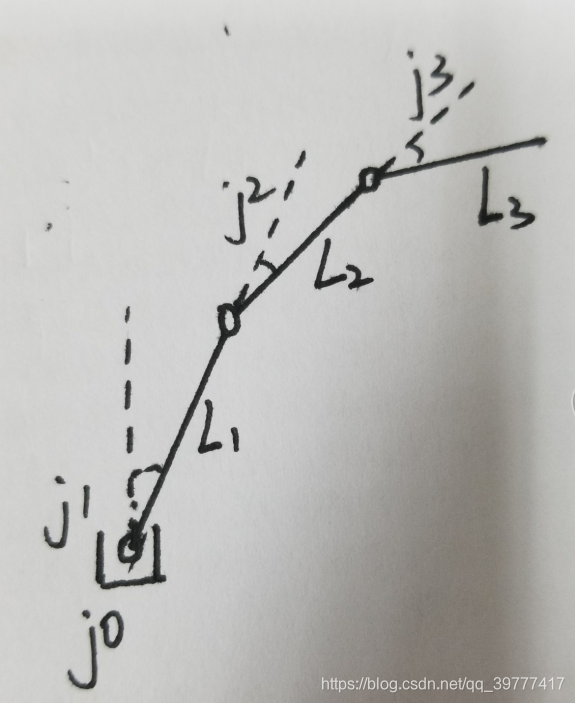
这里的j0、j1、j2、j3是指4个舵机转动的角度,L1、L2、L3指三节手臂的长度。末端执行器(夹子)中心的坐标为逆解目标 (x,y,z)。
这里值得注意的一点就是该手臂与工业6自由度的手有很大区别,工业6自由度的手的逆解目标是末端执行器的姿态加坐标,即一个齐次变换矩阵。而我们这个手按照这样来几乎很多位置都是没有解的,所有我们就剔除姿态,只保留坐标,即我们只要求我们的夹子到达这个坐标,而不需要夹子是以何种姿态到达这个坐标的。所有我们的逆解目标仅仅是个坐标而已。
这样我们容易得到正向解结果如下:
// 根据舵机角度正向解出目标坐标
x = (L1 * sin(j1) + L2 * sin(j1 + j2) + L3 * sin(j1 + j2 + j3))*cos(j0);
y = (L1 * sin(j1) + L2 * sin(j1 + j2) + L3 * sin(j1 + j2 + j3))*sin(j0);
z = L1 * cos(j1) + L2 * cos(j1 + j2) + L3 * cos(j1 + j2 + j3);
这里我们可以看出,我们的输入是j0、j1、j2、j3这四个舵机转动的角度,而我们的目标只是一个 三维坐标(x,y,z)。
逆解就是输入坐标(x,y,z),然后求j0、j1、j2、j3,但是我们逆向求解的时候就可能会出现多组解(未知数的个数4大于方程的个数3)。这样的话我们就只能先确定一个未知数的取值,然后才能对方程进行求解。
底座舵机j0的最好算:
j0 = atan2(y, x);
这里我采取的是先确定j1的值,然后再求解方程(这里方程的推导我就不写啦,直接上代码,代码里就是我解出来的结果)。但是我们所确定的这个j1的值不一定能求出解,也可能求出几组解。所有我们就将j1舵机所能到达的角度都取一遍,保证能求出更多的解。
for (j1 = -90; j1 < 90; j1++)//先确定j1的值,并且把j1从-90°到90°都取一遍,算出所有有可能的解
{
j1 *= RAD2ANG;//弧度转换
j3 = acos((pow(a, 2) + pow(b, 2) + pow(L1, 2) - pow(L2, 2) - pow(L3, 2) - 2 * a*L1*sin(j1) - 2 * b*L1*cos(j1)) / (2 * L2*L3));
//确定j1的角度后,就可以求出j3的角度。
m = L2 * sin(j1) + L3 * sin(j1)*cos(j3) + L3 * cos(j1)*sin(j3);
n = L2 * cos(j1) + L3 * cos(j1)*cos(j3) - L3 * sin(j1)*sin(j3);
t = a - L1 * sin(j1);
p = pow(pow(n, 2) + pow(m, 2), 0.5);
q = asin(m / p);
j2 = asin(t / p) - q;
//接着就可以求出j2的角度。
//求出4个角度后,我们先验算一遍这4个角度求出的值(x1,y1,z1)和我们的目标坐标(x,y,z)是否一致
x1 = (L1 * sin(j1) + L2 * sin(j1 + j2) + L3 * sin(j1 + j2 + j3))*cos(j0);
y1 = (L1 * sin(j1) + L2 * sin(j1 + j2) + L3 * sin(j1 + j2 + j3))*sin(j0);
z1 = L1 * cos(j1) + L2 * cos(j1 + j2) + L3 * cos(j1 + j2 + j3);
j1 = ANG2RAD(j1);
j2 = ANG2RAD(j2);
j3 = ANG2RAD(j3);
//输出误差小于1cm的解,并输出该解的正向解目标
if(x1<(x+1) && x1 > (x-1) && y1<(y + 1) && y1 >(y - 1) && z1<(z + 1) && z1 >(z - 1))
{
printf("j1:%f,j2:%f,j3:%f,x:%f,y:%f,z:%f\r\n", j1, j2, j3, x1, y1, z1);
}
}
可执行的完整C++代码如下(直接复制这个用,上面的代码是过程讲解):
#include "pch.h"
#include <iostream>
#include <stdio.h>
#include <math.h>
#define RAD2ANG (3.1415926535898/180.0)
#define ANG2RAD(N) ( (N) * (180.0/3.1415926535898) )
void inverseKinematics(double x, double y, double z);
int main()
{
inverseKinematics(0, 30, 0);//逆解目标为(0,30,0)这个坐标
}
void inverseKinematics(double x, double y, double z)
{
double a, b, c; //临时变量
double L1 = 10, L2 = 11, L3 = 14;//3节手臂的长度
double m, n, t, q, p;//临时变量
double j1, j2, j3, j0;//4个舵机的旋转角度
double x1, y1, z1;//逆解后正解算出来的值,看是否与逆解值相等
char i = 0;
j0 = atan2(y, x);
a = x / cos(j0);
if (x == 0) a = y; //如果x为0,需要交换x,y
b = z;
for (j1 = -90; j1 < 90; j1++)
{
j1 *= RAD2ANG;
j3 = acos((pow(a, 2) + pow(b, 2) + pow(L1, 2) - pow(L2, 2) - pow(L3, 2) - 2 * a*L1*sin(j1) - 2 * b*L1*cos(j1)) / (2 * L2*L3));
//if (abs(ANG2RAD(j3)) >= 135) { j1 = ANG2RAD(j1); continue; }
m = L2 * sin(j1) + L3 * sin(j1)*cos(j3) + L3 * cos(j1)*sin(j3);
n = L2 * cos(j1) + L3 * cos(j1)*cos(j3) - L3 * sin(j1)*sin(j3);
t = a - L1 * sin(j1);
p = pow(pow(n, 2) + pow(m, 2), 0.5);
q = asin(m / p);
j2 = asin(t / p) - q;
//if (abs(ANG2RAD(j2)) >= 135) { j1 = ANG2RAD(j1); continue; }
/***************计算正解然后与目标解对比,看解是否正确**************/
x1 = (L1 * sin(j1) + L2 * sin(j1 + j2) + L3 * sin(j1 + j2 + j3))*cos(j0);
y1 = (L1 * sin(j1) + L2 * sin(j1 + j2) + L3 * sin(j1 + j2 + j3))*sin(j0);
z1 = L1 * cos(j1) + L2 * cos(j1 + j2) + L3 * cos(j1 + j2 + j3);
j1 = ANG2RAD(j1);
j2 = ANG2RAD(j2);
j3 = ANG2RAD(j3);
if (x1<(x + 1) && x1 >(x - 1) && y1<(y + 1) && y1 >(y - 1) && z1<(z + 1) && z1 >(z - 1))
{
printf("j0:%f,j1:%f,j2:%f,j3:%f,x:%f,y:%f,z:%f\r\n", ANG2RAD(j0), j1, j2, j3, x1, y1, z1);
i = 1;
}
}
for (j1 = -90; j1 < 90; j1++)//这个循环是为了求解另一组解,j2 = asin(t / p) - q;j2 = -(asin(t / p) - q);多了个负号
{
j1 *= RAD2ANG;
j3 = acos((pow(a, 2) + pow(b, 2) + pow(L1, 2) - pow(L2, 2) - pow(L3, 2) - 2 * a*L1*sin(j1) - 2 * b*L1*cos(j1)) / (2 * L2*L3));
//if (abs(ANG2RAD(j3)) >= 135) { j1 = ANG2RAD(j1); continue; }
m = L2 * sin(j1) + L3 * sin(j1)*cos(j3) + L3 * cos(j1)*sin(j3);
n = L2 * cos(j1) + L3 * cos(j1)*cos(j3) - L3 * sin(j1)*sin(j3);
t = a - L1 * sin(j1);
p = pow(pow(n, 2) + pow(m, 2), 0.5);
q = asin(m / p);
j2 = -(asin(t / p) - q);
//if (abs(ANG2RAD(j2)) >= 135) { j1 = ANG2RAD(j1); continue; }
x1 = (L1 * sin(j1) + L2 * sin(j1 + j2) + L3 * sin(j1 + j2 + j3))*cos(j0);
y1 = (L1 * sin(j1) + L2 * sin(j1 + j2) + L3 * sin(j1 + j2 + j3))*sin(j0);
z1 = L1 * cos(j1) + L2 * cos(j1 + j2) + L3 * cos(j1 + j2 + j3);
j1 = ANG2RAD(j1);
j2 = ANG2RAD(j2);
j3 = ANG2RAD(j3);
if (x1<(x + 1) && x1 >(x - 1) && y1<(y + 1) && y1 >(y - 1) && z1<(z + 1) && z1 >(z - 1))
{
printf("j0:%f,j1:%f,j2:%f,j3:%f,x:%f,y:%f,z:%f\r\n", ANG2RAD(j0), j1, j2, j3, x1, y1, z1);
i = 1;
}
}
if (i == 0)printf("无解");
}
输出结果如下图:
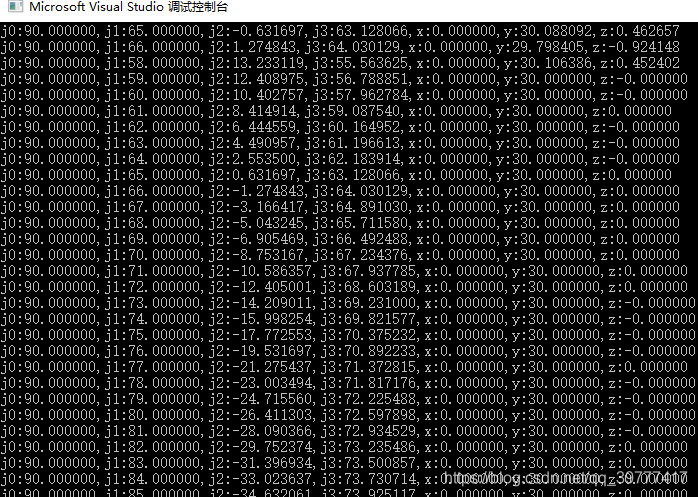
然后我们就可以根据我们的需求选择我们的解,如果只是简单抓取地面上的东西,就选择夹子向下且最接近垂直的那个解,即j3最接近90的那个解,这个解最适合夹取地面上的东西。如果是像视频中倒水一样,就得选择夹子为水平的解,具体是个什么约束关系你们可以自己推一推。反正你可以自由选择解。
2022年2月更:之前的这个求解方式对于姿态的约束是有一些问题的,此课程包含了修正后的3、4自由度机械臂的逆解推导与源码,有兴趣的可以了解一下
最后大家有不懂或者有更好建议的请加我
机械臂基础入门图文教程1
机械臂基础入门图文教程2
机械臂基础入门图文教程3
控制该机械臂的视频教程与源码、包括机械臂系统从上到下的梳理、机械臂的硬件、通讯与控制
QQ:965295412 WX:15310294950

















 2886
2886

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









