






Do we need scan-matching in radar odometry?
摘要:目前,正见证着4D多普勒雷达和激光雷达测距传感器的蓬勃发展,它们产生的3D点云包含了有关每个点相对于传感器的径向速度信息。特别是在低能见度条件下(如尘埃、烟雾)进行物体感知和导航时,4D雷达显得格外引人注目,而此时激光雷达和摄像头通常表现不佳。随着高分辨率多普勒雷达的出现,单一点云就有可能估算里程计,无需进行在特征稀疏场景环境中容易出错的扫描配准。我们对几种里程计估算方法进行了比较,包括直接积分多普勒/惯性测量单元(IMU)数据、卡尔曼滤波传感器融合,以及3D点云的扫描对扫描和扫描对地图的配准。我们使用了来自两个最新的4D雷达和两个IMU的三个数据集。令人惊讶的是,我们的结果表明,仅使用多普勒和IMU数据得到的里程计结果相比于3D点云配准,要么相似,要么更为优越。在我们的实验中,平均位置误差可低至1.8和4.5公里轨迹上的0.3%。这为在特征稀疏的矿山环境中准确估算长距离上的6自由度自我运动提供了可能,尤其适用于资源受限的机器人平台在特征稀疏和低能见度条件下的导航,例如采矿、建筑和搜救等应用。
关键词— 4D雷达,雷达里程表,移动机器人,定位
I. 引言
在汽车工业的推动下,毫米波成像雷达的迅猛发展为定位和建图提供了可能性,尤其是在我们预期能见度恶化和传感器积灰的环境中。将无人车辆投入采矿、建筑或搜救等领域是这种能力的典型应用。类似于3D激光雷达,现代成像雷达能够提供周围环境的3D扫描。通过充分利用返回信号的精确相位测量,它们还能够估算每个感测到的3D点的径向速度。我们进一步将其称为多普勒速度,这已被证明在里程计方法中具有明显优势,不仅有助于动态和静态对象的分割[1],还引入更多约束用于自我运动估计[2],[3]。此外,速度测量无需进行数据关联,这在特征稀疏的环境中可能具有挑战性,比如在地下矿井中。

图1: 通过两种传感器模式(激光雷达和雷达)捕捉的Kvarntorp矿山环境的详细部分。雷达模式受到有限的视场(FOV)、较低的分辨率和较少的返回值的影响。然而,在采矿中,由于其更适用于低能见度条件,雷达模式更为合适。
近年来,出现了几种雷达里程计和同时定位与建图(SLAM)的方法。在解决地下矿山环境下SLAM系统开发的问题的驱动下,我们比较了几种代表性的雷达里程计估计方法。为此,我们将它们应用于包括两种不同的现代成像雷达的三个数据集上。两个数据集是使用我们的移动传感器装置记录的:一个在地下矿山(图1),另一个在用于大型轮式装载机的户外测试场地(图3和图4)。第三个数据集由Zhang等人[4]发布,代表一个结构化的城市环境。令人惊讶的是,使用最简单的方法,即直接将基于多普勒的雷达自我速度与惯性测量单元(IMU)提供的方向融合,我们能够在从矿山和户外测试场地的4.5公里和1.8公里轨迹上实现低至0.3%的本地化漂移。我们发现这一实验结果对于设计适用于上述应用的定位和建图系统非常有用,并值得在机器人学界进行进一步研究。此外,我们将我们的数据集公开发布在https://github.com/kubelvla/mine-and-forest-radar-dataset,因为高级别的雷达数据集仍然难以获得。
II. 相关工作
在本节中,我们将简要回顾基于2D扫描雷达的雷达里程计算法。然后,更紧密地与本文相关的是,我们将关注现代4D雷达里程计的最新进展。传统的2D扫描雷达通常以谱图的形式提供扫描,这些谱图在单个雷达扫描期间编码了每个方位上的信号强度。Cen等人[5],[6]提出了从这些谱图中提取雷达关键点的方法,并展示了他们的方法如何改进扫描匹配。随后的作品,如Barnes等人[7],采用机器学习技术来改进关键点检测。Burnett等人[8]展示了在雷达数据中解决运动失真和多普勒频移的重要性。与寻找关键点相反,Adolfsson等人[9]从点云角度着手解决问题,关注可能更好地约束匹配过程的局部几何。Park等人[10]通过应用Fourier-Mellin变换来查找连续雷达扫描之间的相关性,从而完全避免了点匹配。
4D多普勒成像雷达的迅速发展在目标检测、运动估计和定位方面带来了新的可能性。Venon等人[11]和Zhou等人[12]的调查提供了该研究方向的全面概述。德州仪器的毫米波传感器引起了很多关注,因为它们轻巧且仍能提供带有多普勒速度的数十个3D点。
Doer和Trommer[2]提出了一种松散耦合的扩展卡尔曼滤波(EKF)过滤方法,将雷达自我速度、惯性和气压测量融合起来,以跟踪无人机(UAV)的姿态。他们开发了一种基于RANSAC的最小二乘优化算法,从雷达数据中提取雷达自我速度。在他们的后续工作[13]中,他们还加入了全球导航卫星系统(GNSS)测量。在我们的工作中,我们采用了他们的开源实现来进行与我们的传感器套件的实验。
与滤波方法相反,Kramer等人[14]提出了一种滑动窗口优化算法,将多普勒和惯性测量融合起来以跟踪移动传感器装置的姿态。他们在地下和户外环境中验证了他们的结果。专注于无人机应用,Michalczyk等人[3],[15]提出了一种紧密耦合的基于EKF的雷达里程计方法。他们的方法包括点匹配,其中匹配点之间的感知距离与多普勒速度一起作为EKF的残差向量。Lu等人[16]采取了不同的方向,通过深度神经网络(DNN)处理雷达测量和惯性测量来估计移动体的姿态。他们使用卷积神经网络(CNN)从雷达数据中提取特征,并使用递归网络分析惯性数据。在接下来的DNN阶段中,这些特征被融合以产生姿态估计。
随着4D成像雷达的发展和其分辨率的提高,经典的3D扫描匹配方法变得可行。Zhuang等人[17]通过迭代的扩展卡尔曼滤波(EKF)将惯性数据、基于多普勒的自我运动估计和扫描到子地图的约束融合,得到了雷达里程计。在一个独立的模块中,他们通过执行基于广义ICP(GICP)的回环闭合和全局地图优化将系统完善为完整的SLAM解决方案。他们使用了一台具有300米范围和0.3米分辨率的Continental ARS548雷达,每次扫描产生约400个点。Zhang等人[4]选择了一种经典的SLAM方法,使用了他们的Oculii Eagle雷达传感器(在他们的公开数据集中每次扫描大约有5000个点)。他们通过在Koide等人[18]的SLAM网络中添加一个修改过的GICP匹配算法,该算法考虑雷达点云中的特定空间不确定性,从而修改了该SLAM网络。由于他们的工作和数据集是开源的,因此我们将它们包括在我们的实验评估中。

III. 雷达里程计变体
在众多雷达里程计方法中,我们选择了一组代表性的方法,这些方法是开源的,适用于我们的传感器,并涵盖了从简单的传感器融合到高级扫描匹配的方法。
A. 多普勒速度和IMU
在本工作中测试的姿态估计的最简单方法利用了由IMU提供的方向和由多普勒雷达传感器测量的自我速度。首先,将自我速度从移动平台的坐标系变换到基于IMU姿态的世界坐标系。然后,假设在连续雷达扫描之间速度恒定,对其进行数值积分。通过这种方式,生成了在世界坐标系中表示的轨迹。在文中的后续部分,我们将这种方法称为IMU+多普勒。由于雷达并不直接提供自我速度测量,而是提供其检测到的目标速度的径向分量,因此需要稳健地处理这些信息以估算雷达的自我速度。为此,我们采用了Doer和Trommer[2]提出的方法和实现。他们的3点RANSAC-LSQ自我运动估计方法将RANSAC应用于底层最小二乘优化问题(见[2]中的方程27-32)。该算法非常高效,在我们的数据集中,每次雷达扫描的平均处理时间为10毫秒。

B. 扩展卡尔曼滤波融合
与直接的多普勒+IMU融合相比,使用扩展卡尔曼滤波器(EKF)允许更加原则性地处理传感器测量中的噪声,并提供姿态置信度估计。我们使用了Doer和Trommer[2]提供的实现,该实现将他们的3点RANSAC-LSQ自我运动估计与惯性和气压测量相结合。传感器测量通过EKF以松散耦合的方式进行融合。算法有几个可用的扩展版本,我们选择了原始的ekf-rio版本,因为它不需要精确的雷达触发信号,而我们的雷达不幸没有提供这个信号。在这种情况下,该算法将入射的自我运动测量与大约100毫秒的延迟应用,这可能影响状态估计的质量,特别是在高度动态运动期间。此外,由于我们的传感器装置缺少气压计,我们省略了气压计测量。因此,我们在这里获得的结果代表了滤波方法可以实现的里程计质量的下限。我们在后文中将这种方法称为EKF。值得注意的是,Michalczyk等人[3],[15]的工作报告称,通过采用紧密耦合的EKF过滤进行雷达惯性里程计,可以获得[2]的改进。他们能够实现低于1%的定位漂移。紧密耦合算法如何处理数千个目标的高级别雷达扫描仍然是一个有趣的问题。
C. 点对平面迭代最近点与局部地图
被测试雷达的高分辨率使我们能够测试最初为激光雷达点云配准开发的方法。为了测试扫描到子地图匹配的变体,我们使用了开源且高度可配置的norlab-icp-mapper3。它支持一系列迭代最近点(ICP)的变体,我们选择了点对平面的变体,因为它在结构化和半结构化环境中通常表现良好。该地图制作工具不支持通过回环闭合识别进行地图优化,而是建立一个整体地图,因此表现为激光雷达里程计方法。在我们的实验中,该地图制作工具被设置为将新点添加到地图中,最大密度由点之间的最小距离定义,该最小距离在我们的实验中为0.1米。点对平面ICP还需要基于地图中每个点周围的局部几何来估计法向量。在我们的实验中,我们使用了15个最近点。此外,初步测试表明,当在雷达数据上部署时,该地图制作工具需要先前的运动估计。因此,在所有实验中,我们提供多普勒+IMU的姿势作为先验。地图制作工具中的ICP算法提供了完整的6自由度(DOF)姿势估计,或者受限的4自由度姿势估计。在4自由度变体中,仅在点云配准中优化位置和航向,其他两个自由度直接由地图制作工具从IMU提供的方向中采用。在本工作中,我们测试了这两个变体,并将它们称为ICP和ICP 4DOF。
D. 扫描到扫描匹配变体
在本工作中测试的雷达里程计变体的最后一组采用了扫描到扫描匹配,这经常在更大SLAM框架的前端模块中使用。Zhang等人[4]成功地在现代成像雷达(Oculii Eagle)上的SLAM框架中应用了这种方法。由于他们的SLAM框架的实现是开源的,我们在这里包括它,以测试它们的雷达里程计与我们的雷达数据集。此外,他们提供了他们数据集中的一个会话,这反过来使我们能够使用Oculii Eagle雷达测试所有其他方法。他们的雷达里程计前端是高度可配置的,允许用户从几个其他扫描匹配算法中进行选择。我们选择测试他们的自适应概率分布-GICP(APDGICP)变体的GICP。他们的扫描匹配方法可以在没有先前运动估计的情况下工作,但我们修改了代码以包括使用多普勒+IMU里程计先验的选项。这使得与扫描到子地图匹配变体的比较更加公平。在提供先验时,我们将该方法称为APDGICP IMU Prior,否则称为APDGICP。我们还选择测试他们的正态分布变换(NDT)扫描匹配算法,因为它经常用于激光雷达里程计解决方案。对于NDT,我们始终使用多普勒+IMU先验,并在评估中将其称为NDT。

IV. 实验和分析
本节首先介绍用于记录实验轨迹的两个环境,然后介绍了一项采用了Zhang等人[4]发布的数据集的实验。还提供了记录实验所使用的传感器套件的详细信息。随后,通过绝对姿态误差(APE)和相对姿态误差(RPE)这两种广泛用于此目的的指标,研究了所讨论的雷达里程计方法的性能。

A. 环境和传感器设置
受到在恶劣环境条件下进行SLAM研究的启发,我们记录了两个现场数据集:一个在瑞典厄勒布鲁附近的Kvarntorp研究矿山,另一个在瑞典Eskilstuna的沃尔沃建筑设备装载机和自卸车室外测试场地。
Kvarntorp测试矿山为地下采矿行业应用提供了一个模型环境。使用传感器套件记录了一次长达4500米的行驶,该套件连接到一辆皮卡车的车顶,如图2所示。平均速度为21 km/h,接近矿井中可安全行驶的最大速度。图1给出了地下隧道的一般印象。在一些位置,隧道是直的,没有侧隧道,这些部分通常对于任何SLAM类型来说都是最具挑战性的,无论其模态如何。另一方面,具有侧隧道的位置提供了SLAM算法可以受益的大量几何约束。图1显示了这样一个区域,其中呈现了两种模态,激光雷达以灰度点表示,雷达以彩色点表示。为了参考,还提供了RGB相机的视图。在文中的后续部分,我们将这个实验称为Mine。
Eskilstuna室外测试场地由沃尔沃CE用于其产品的开发和测试,包括如图3所示的大型装载机。对于我们的实验,用于Mine的传感器套件从皮卡卡车移到了沃尔沃装载机上。记录了一条长为1800米的轨迹,该轨迹使装载机通过开阔空间和森林道路(见图4)。轨迹是一个循环,重复两次,平均速度为13.6 km/h。记录了精确的RTK-GPS参考,但为了本研究的目的,我们基于激光雷达SLAM的参考进行度量。我们在这里仅确认RTK-GPS的定位与我们的参考SLAM结果一致。在文中的后续部分,我们将这个测试场地称为Forest。
实验中使用的传感器套件的详细信息如图2所示。传感器连接到金属架上,并连接到运行Ubuntu和安装有ROS的Intel NUC计算机。原始数据保存为ROS bag文件以供以后处理。该套件包括三个雷达,一个激光雷达,三个相机和一个IMU。在Mine和Forest中使用的雷达是Sensrad Hugin A3雷达,其水平和垂直FOV分别为80°和30°。由于其配置为48×48的发射和接收天线,水平和垂直分辨率分别为1.25°和1.7°。雷达在短距离设置下运行,这意味着最大范围为42米,但可以提供0.1米的最高范围分辨率。帧率为16 Hz,扫描在我们的环境中包含大约10000个点。用于参考定位的是Ouster OS1-32激光雷达。激光雷达的帧率为10 Hz,并且所有点都在主计算机上经过PTP同步时间戳。最后,由Xsens MTi-30 IMU记录惯性数据,帧率为400 Hz。IMU正在使用VRU General配置进行自己的姿态估计,该配置不使用磁强计数据来绝对参考航向角。然而,磁强计测量仍然用于估计陀螺仪偏差,从而将航向漂移限制到理想条件下的3°/h。
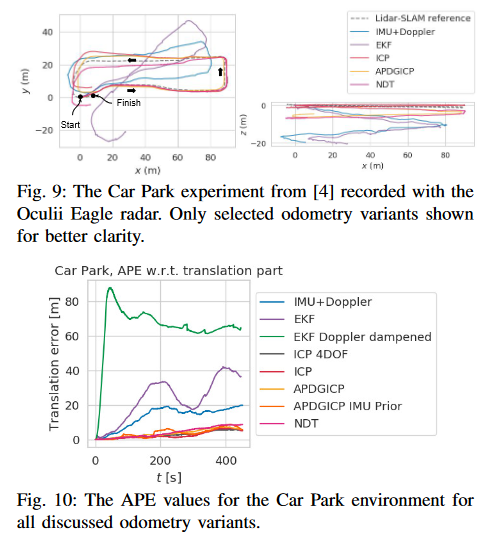
Car Park轨迹是由Zhang等人[4]记录的数据集的一部分。在他们的设置中,他们使用了Oculii Eagle雷达,提供120°×30°(水平,垂直)的FOV和0.5°、1°和0.16米(水平,垂直,距离)的分辨率。在Car Park实验中,雷达扫描包含大约5000个点。传感器的射程超过350米,制造商表示使用自适应调制来提高分辨率同时保持长距离。从数据集中提供的点云中,可以看出传感器软件进行了一些增强。Zhang的传感器套件如图5所示,还包括激光雷达、气压计、相机和两个IMU,一个是独立的Vectornav IMU,另一个是激光雷达传感器的内部IMU。为了测试需要惯性数据的里程计变体,我们使用Vectornav IMU测量。Car Park实验的轨迹是由手推手推车记录的一个矩形,传感器套件连接到它上面。环境是大学校园建筑之间的停车场。基于激光雷达SLAM解决方案的预先计算的地面真实定位在数据集中可用,并由我们使用。
B. 里程计性能评估
为了比较第III节中介绍的雷达里程计变体的性能,我们使用了广泛采用的APE和RPE度量,使用Evo库的实现[19]。APE与轨迹图一起为给定的传感和环境组合提供了初始的、总体的里程计变体行为的概念,但易受姿态误差累积的乘法、非线性效应的影响。RPE补充了这个度量,表明了错误积累的速率。对于APE,我们提供其平移分量,因为旋转误差在随附的轨迹图中是明显的。对于RPE,我们为平移和旋转分量提供了一个总体统计。用于评估里程计误差的地面真实性来自于基于激光雷达SLAM的LIDAR。激光雷达地图及随后的参考定位是由开源的HDL Graph Slam [18]实现创建的。
图6和图7展示了在Mine实验中讨论的雷达里程计的性能。与我们的先验提供的APDGICP变体(有和没有)以及NDT一起,不适用于Hugin雷达提供的输出类型,因此我们在图6图中省略了它们,因为它们在APE图中随机发散。我们将此归因于后续雷达扫描中的低密度和高方差,这导致了扫描匹配方法的快速发散。即使我们提供更精确的IMU+Doppler先验估计,这种行为在这种情况下也是相似的。
正如我们后来在RPE中展示的那样,主要的错误来源是姿态的强烈漂移。由ICP变体(4DOF和6DOF)表示的扫描到子图匹配在Mine实验中表现更好,尽管漂移比在相似环境中的激光雷达里程计中预期的漂移要大得多(例如,参考Subterranean DARPA机器人挑战的SLAM结果[20])。将ICP限制为4DOF减小了垂直漂移,并导致整体较低的APE。
与ICP相似的结果来自EKF方法,它免于扫描匹配问题,但受到测得的多普勒速度的突变的影响。只要地面平坦,本地化漂移与激光雷达测距速率相当,即低于1%。一旦卡车碰到颠簸,EKF通过不适当的校正做出反应,可以在Mine实验中的180和250秒时观察到。由于Hugin雷达不提供测量触发信号,我们假设测量滞后导致与惯性测量不匹配。雷达扫描是有时间戳的,但可用的EKF实现不会重新计算过去的状态,而是依赖于及时的触发信号和状态克隆技术。这个问题可以通过增加多普勒速度测量的测量不确定性来部分缓解,这使得估计的轨迹更加平滑,但也减少了EKF快速估计传感器偏差和检测微小运动的能力。我们在图中将这个修改后的变体标记为Doppler dampened。
令人惊讶的是,最简单的IMU+Doppler方法显示出最好的结果。漂移很小,与最先进的激光雷达里程计技术相当。我们将这归因于Hugin雷达在多普勒速度值的高精度以及特定IMU单元利用磁强计测量抑制航向漂移的能力。缺点是与其他技术相反,它不提供任何置信度估计。
Forest实验的结果遵循Mine实验的趋势。图8显示了扫描到扫描技术立即发散,而与Mine实验相比,扫描到子图的ICP漂移速度相似。主要区别在于Doppler dampened EKF的行为。由于大型和沉重的轮式装载机的较慢速度和整体稳定性,它不受突发的多普勒速度冲击的影响,而且与简单的IMU+Doppler里程计密切相关。
基于Oculii Eagle雷达的Car Park实验显示出不同的趋势。图9显示,更简单的方法,即IMU+Doppler和EKF,受到垂直和航向漂移的影响。我们认为这主要是由于[4]在记录数据集时使用的IMU类型导致的。由于加速度计偏置,Doppler dampened EKF在轨迹图中被省略,因为它立即发散,需要一分钟来估计(见图10)。此外,此数据集中的多普勒速度估计的准确性较低,这影响了轨迹的平滑性。我们假设传感器内部的扫描增强过程可能会影响多普勒速度值的质量。另一方面,所有的扫描匹配技术都表现良好。Eagle雷达的较长范围和自适应调制使得扫描匹配任务更加可靠。实际上,ICP、APDGICP和NDT的所有变体都表现相似,并且在APE中保持在10米以内,如图10所示。
我们使用RPE度量总结了两个不同雷达的里程计方法的性能,如图11所示。为了清晰起见,在这个图中,我们省略了子变体,因为它们的RPE没有实质性的区别。轨迹分为1米和10米步长进行RPE评估。图中显示了平移和旋转错误的分布,中值直接在图中。平移误差以步长的百分比表示,旋转误差保留在绝对值中,因此较长的步长产生较大的旋转误差。还要注意,在平移中,我们观察到1米步长的相对误差较高。鉴于所有方法的已经很高的准确性,我们正在接近基于激光雷达SLAM的地面真实定位的噪声。这也是为什么我们不考虑单帧大小的步长,对于这种情况,需要更精确的参考。
Hugin雷达的Mine和Forest实验主要受到估计姿态的噪声的影响,因为方法之间的平移误差差异不如产生的APE那么深刻。RPE度量的旋转部分证实了APE中看到的趋势。Xsens IMU提供的原始方向支持高度准确的多普勒速度,并导致高度准确的结果。
Car Park实验表明,依赖多普勒速度的方法(IMU+Doppler、EKF)的翻译更差。在旋转误差中,我们看到扫描匹配的限制效果,防止更大的错误累积,与IMU+Doppler和EKF相反。
V. 结论
在这项工作中,我们在两种不同的现代成像雷达记录的三个数据集中比较了几种雷达里程计估计方法,这些数据集包括地下和户外环境。通过Oculii Eagle雷达,扫描匹配方法的准确性优于滤波方法。另一方面,由于Sensrad Hugin雷达中的高精度多普勒速度测量,最简单的传感器融合方法IMU+Doppler在Mine和Forest实验中仅实现了0.3%的位置漂移。这使得该方法适用于在恶劣环境中运行的资源受限机器,例如矿业中的重型机械。在未来的工作中,我们将调查Eagle雷达中多普勒速度不准确的原因,并将雷达里程计扩展为完整的SLAM解决方案。
REFERENCES
[1] A. Kingery and D. Song, “Improving ego-velocity estimation of lowcost Doppler radars for vehicles,” IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 9445–9452, 2022.
[2] C. Doer and G. F. Trommer, “An EKF based approach to radar inertial odometry,” in 2020 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), 2020, pp. 152159.
[3] J. Michalczyk, R. Jung, and S. Weiss, “Tightly-coupled ekf-based radar-inertial odometry,” in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022, pp. 12 336–12 343.
[4] J. Zhang, H. Zhuge, Z. Wu, G. Peng, M. Wen, Y. Liu, and D. Wang, “4dradarslam: A 4d imaging radar slam system for large-scale environments based on pose graph optimization,” in 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 83338340.
[5] S. H. Cen and P. Newman, “Precise ego-motion estimation with millimeter-wave radar under diverse and challenging conditions,” in 2018 IEEE International Conference on Robotics and Automation (ICRA), 2018, pp. 6045–6052.
[6] S. H. Cen and P. Newman, “Radar-only ego-motion estimation in difficult settings via graph matching,” in 2019 International Conference on Robotics and Automation (ICRA), 2019, pp. 298–304.
[7] D. Barnes and I. Posner, “Under the radar: Learning to predict robust keypoints for odometry estimation and metric localisation in radar,” in 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 9484–9490.
[8] K. Burnett, A. P. Schoellig, and T. D. Barfoot, “Do we need to compensate for motion distortion and Doppler effects in spinning radar navigation?” IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 771–778, 2021.
[9] D. Adolfsson, M. Magnusson, A. Alhashimi, A. J. Lilienthal, and H. Andreasson, “Cfear radarodometry-conservative filtering for efficient and accurate radar odometry,” in 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021, pp. 5462–5469.
[10] Y. S. Park, Y.-S. Shin, and A. Kim, “PhaRaO: Direct radar odometry using phase correlation,” in 2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 2617–2623.
[11] A. Venon, Y. Dupuis, P. Vasseur, and P. Merriaux, “Millimeter wave fmcw radars for perception, recognition and localization in automotive applications: A survey,” IEEE Transactions on Intelligent Vehicles, vol. 7, no. 3, pp. 533–555, 2022.
[12] Y. Zhou, L. Liu, H. Zhao, M. L ́ opez-Benı ́tez, L. Yu, and Y. Yue, “Towards deep radar perception for autonomous driving: Datasets, methods, and challenges,” Sensors, vol. 22, no. 11, 2022. [Online]. Available: Sensors | Free Full-Text | Towards Deep Radar Perception for Autonomous Driving: Datasets, Methods, and Challenges
[13] C. Doer, J. Atman, and G. F. Trnmmer, “Gnss aided radar inertial odometry for uas flights in challenging conditions,” in 2022 IEEE Aerospace Conference (AERO), 2022, pp. 1–10.
[14] A. Kramer, C. Stahoviak, A. Santamaria-Navarro, A.-A. AghaMohammadi, and C. Heckman, “Radar-inertial ego-velocity estimation for visually degraded environments,” in 2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 5739–5746.
[15] J. Michalczyk, R. Jung, C. Brommer, and S. Weiss, “Multi-state tightly-coupled ekf-based radar-inertial odometry with persistent landmarks,” in 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 4011–4017.
[16] C. X. Lu, M. R. U. Saputra, P. Zhao, Y. Almalioglu, P. P. B. de Gusmao, C. Chen, K. Sun, N. Trigoni, and A. Markham, “Milliego: Single-chip mmwave radar aided egomotion estimation via deep sensor fusion,” in Proceedings of the 18th Conference on Embedded Networked Sensor Systems, ser. SenSys ’20. New York, NY, USA: Association for Computing Machinery, 2020, p. 109–122. [Online]. Available: EZproxy - Login
[17] Y. Zhuang, B. Wang, J. Huai, and M. Li, “4d iriom: 4d imaging radar inertial odometry and mapping,” IEEE Robotics and Automation Letters, vol. 8, no. 6, pp. 3246–3253, 2023.
[18] K. Koide, J. Miura, and E. Menegatti, “A portable three-dimensional lidar-based system for long-term and wide-area people behavior measurement,” International Journal of Advanced Robotic Systems, vol. 16, 02 2019.
[19] M. Grupp, “evo: Python package for the evaluation of odometry and slam.” https://github.com/MichaelGrupp/evo, 2017.
[20] K. Ebadi, L. Bernreiter, H. Biggie, G. Catt, Y. Chang, A. Chatterjee, C. E. Denniston, S.-P. Deschˆ enes, K. Harlow, S. Khattak, L. Nogueira, M. Palieri, P. Petr ́ aˇ cek, M. Petrlı ́k, A. Reinke, V. Kr ́ atk ́ y, S. Zhao, A. akbar Agha-mohammadi, K. Alexis, C. Heckman, K. Khosoussi, N. Kottege, B. Morrell, M. Hutter, F. Pauling, F. Pomerleau, M. Saska, S. Scherer, R. Siegwart, J. L. Williams, and L. Carlone, “Present and future of slam in extreme underground environments,” 2022, arXiv preprint.
个人总结
雷达里程计(odometry)的作者在论文中比较了几种方法,主要包括以下几种:
-
Doppler Velocity and IMU (IMU+Doppler): 最简单的方法,利用惯性测量单元(IMU)提供的方向信息和雷达多普勒速度测量来进行姿态估计。
-
Extended Kalman Filter Fusion (EKF): 利用扩展卡尔曼滤波器(EKF)进行融合,将雷达多普勒速度、惯性和气压计测量结合在一起,提供更为稳健的噪声处理和姿态估计。
-
Point-to-Plane Iterative Closest Point with Local Map (ICP): 利用高分辨率雷达数据,采用基于点到平面的迭代最近点(ICP)方法进行局部地图的匹配。
-
Scan-to-Scan Matching Variants (e.g., APDGICP, NDT): 使用扫描匹配方法,比如自适应概率分布的GICP(APDGICP)和正态分布变换(NDT),这些方法通常用于大型SLAM框架的前端模块。
这些方法覆盖了直接传感器融合、滤波方法、点云匹配等不同的技术路径,以适应不同的雷达和环境特性。作者通过对这些方法在地下矿山、室外测试场地和城市环境中的数据集上的实验比较,得出了它们的性能和适用性的结论。















 6720
6720











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









