







 本文详细介绍了如何在Ubuntu系统上手动安装ROS2,包括添加源、安装依赖、配置环境变量、自启动以及测试,同时也提供了卸载ROS2的步骤。
本文详细介绍了如何在Ubuntu系统上手动安装ROS2,包括添加源、安装依赖、配置环境变量、自启动以及测试,同时也提供了卸载ROS2的步骤。
按照如下步骤进行操作即可:
1. 手动安装ROS2
第一步:Ctrl+Alt+T打开终端
第二步:添加源
echo "deb [arch=$(dpkg --print-architecture)] https://repo.huaweicloud.com/ros2/ubuntu/ $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
第三步:添加源对应的秘钥
sudo apt install curl gnupg2 -y
curl -s https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc | sudo apt-key add -
第四步:更新
sudo apt update
第五步:安装ROS2
sudo apt install ros-humble-desktop
安装中途选Y就行。
第六步:安装额外依赖
sudo apt install python3-argcomplete -y
第七步:安装编译工具
sudo apt install python3-colcon-common-extensions
第八步:配置环境变量
source /opt/ros/humble/setup.bash
第九步:配置开启自启动
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
第十步:更新配置文件
source ~/.bashrc
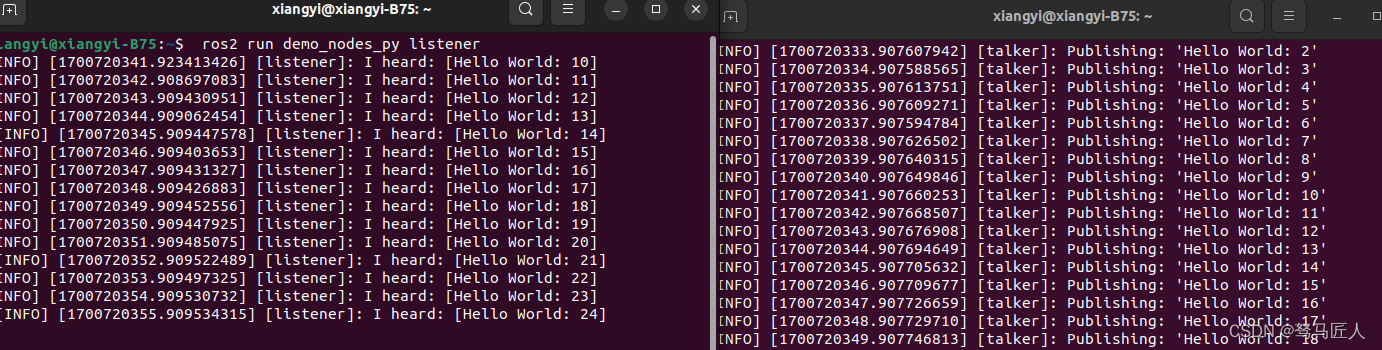
安装完毕,可以在窗口中使用ros2 run demo_nodes_cpp talker和ros2 run demo_nodes_py listener进行测试,如果相应成功,按么安装成功。
2. 卸载ROS2
sudo apt remove ros-humble-*
sudo apt autoremove
ROS2默认的安装目录是:/opt/ros/humble/


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











