







 文章探讨了Ackerman公式如何在实际控制系统中应用于车辆转向,强调了轴距和弧半径对车轮转角的影响。尽管Ackerman公式提供了一个理论基础,但在实际应用中,车轮转角与方向盘转角的关系需要通过查表来得到精确转换。
文章探讨了Ackerman公式如何在实际控制系统中应用于车辆转向,强调了轴距和弧半径对车轮转角的影响。尽管Ackerman公式提供了一个理论基础,但在实际应用中,车轮转角与方向盘转角的关系需要通过查表来得到精确转换。
在做控制算法,一直有Ackerman公式如何让在实际系统中应用不是很清晰。如下图所示,笔者绘制了下图,清晰阐述了Ackerman在实际工程中是如何应用的
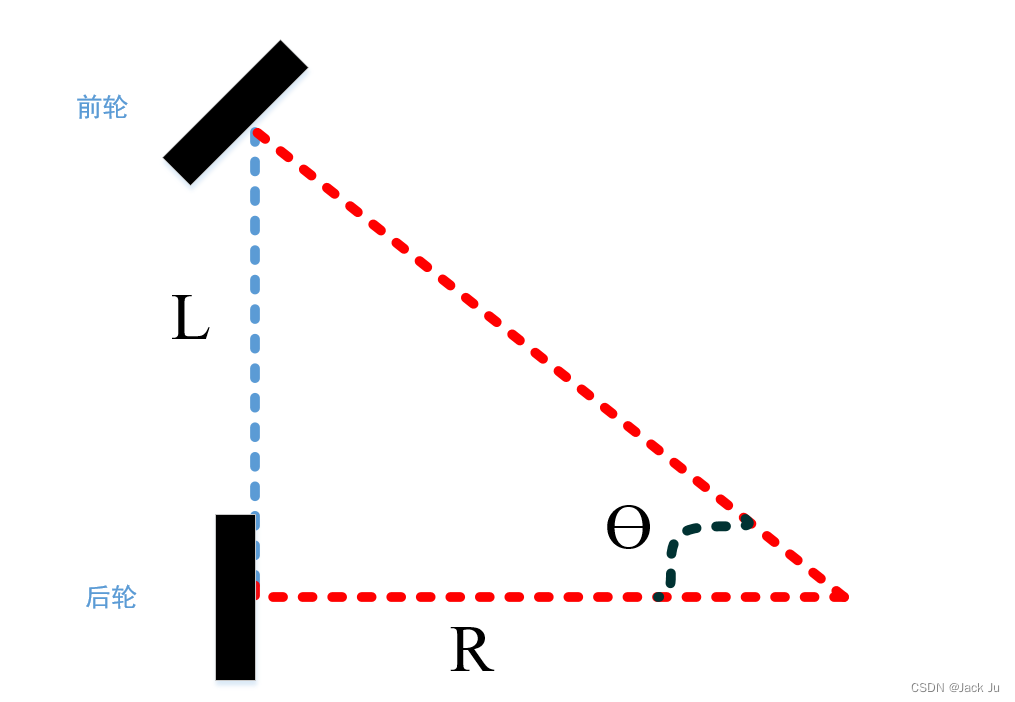
tanθ=L/R
L是轴距,R是弧半径。Θ弧夹角(外轮转角),如图所示。
实际上,Ackerman车轮转角与方向盘转角之间的关系,实际上没有精确,需要进行查表处理。
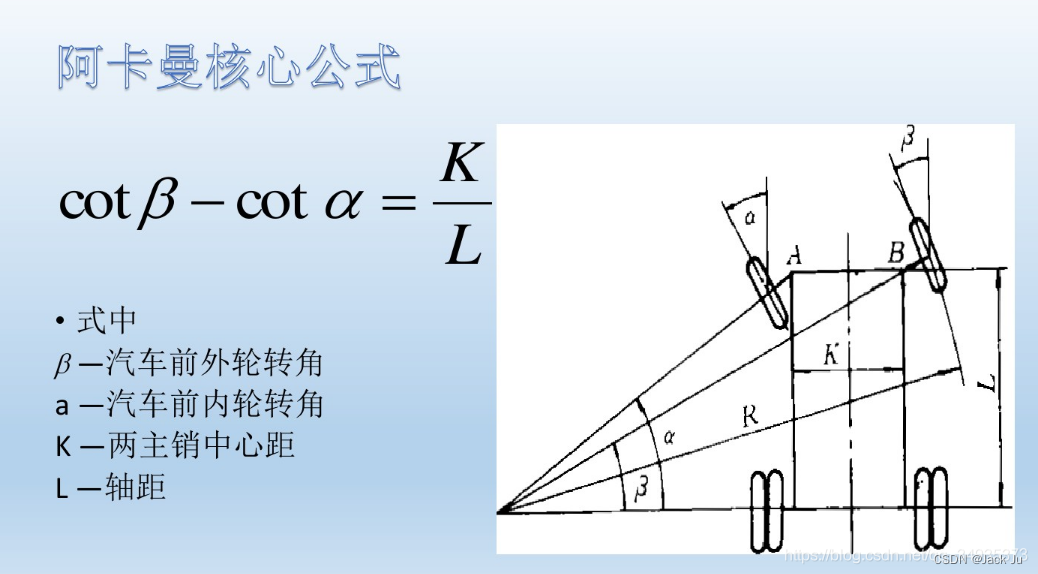
下图是网上的图,和实际使用还是有区别!
在做控制算法,一直有Ackerman公式如何让在实际系统中应用不是很清晰。如下图所示,笔者绘制了下图,清晰阐述了Ackerman在实际工程中是如何应用的
tanθ=L/R
L是轴距,R是弧半径。Θ弧夹角(外轮转角),如图所示。
实际上,Ackerman车轮转角与方向盘转角之间的关系,实际上没有精确,需要进行查表处理。
下图是网上的图,和实际使用还是有区别!
 175
1万+
175
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























