






阿克曼运动解算
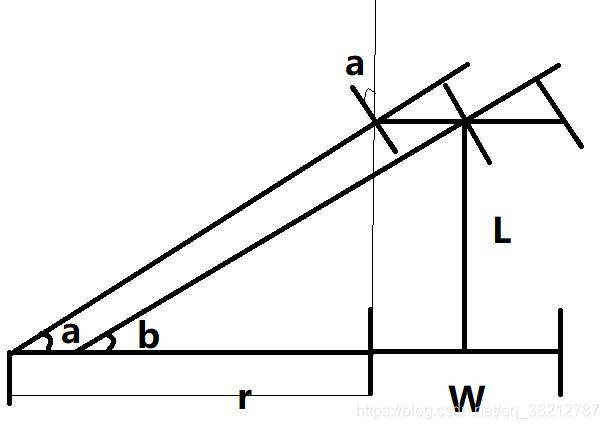
L:前后轮轴距
W:左右轮距
r: 后轮内切圆半径
a: 左轮内切圆角度,也就是内轮的转角
b: 中心自行车模型的转角
阿克曼模型的内转角大于外转角
根据车子接收的线速度和角速度推导出内轮转角
公式推导:
r:未知
r = L/tanb-w/2
sin a = L/r
tan b = L/(r + w/2)
tan a = L/r = L/(L/tanb - w/2) = 2Ltanb/(2L - wtanb)
a = arctan(2Ltanb/2L - wtanb) = arctan(2Lsinb/(2Lcosb - w*sinb))

















 756
756

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









