







点云数据集整理
分类
modelnet40
https://blog.csdn.net/weixin_43199584/article/details/105378083
大概416M?
普林斯顿ModelNet项目的目标是为计算机视觉、计算机图形学、机器人和认知科学领域的研究者们提供一个全面、干净的三维CAD模型集合, 该数据的主页地址https://modelnet.cs.princeton.edu, 数据最早发布在论文3D ShapeNets: A Deep Representation for Volumetric Shapes [CVPR 2015]上.
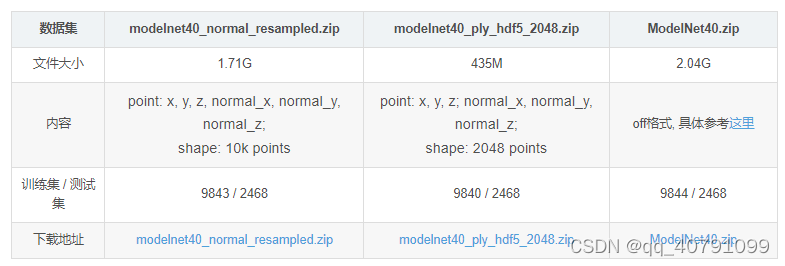
相关工作人员从数据中选择了常见的40类和10类构成数组子集, 分别表示为ModelNet40和ModelNet10, 且两个数据集都有orientation aligned的版本。实验中数据用到比较多的是ModelNet40, 有如下三种数据形式:
https://blog.csdn.net/zhulf0804/article/details/110259055?spm=1001.2014.3001.5501
modelnet40_ply_hdf5_2048
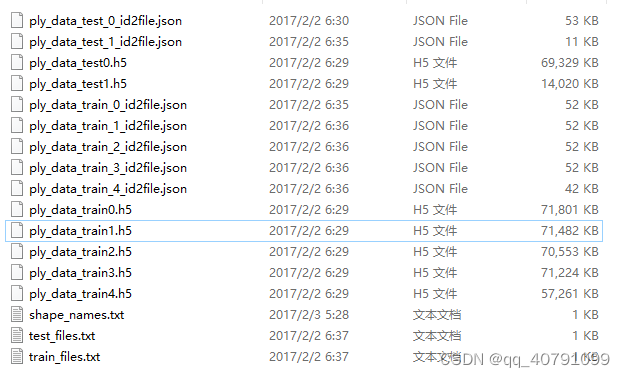
ply_data_train0.h5:有2048个模型,每个模型有2048个点,每个点包含xyz三个数据
ply_data_train1.h5——ply_data_train3.h5同上
ply_data_train4.h5:有1648个模型
所以加起来训练数据:9840个
ply_data_test0.h5:2048个模型,每个模型2048个点,其他同上
ply_data_test1.h5:420个模型
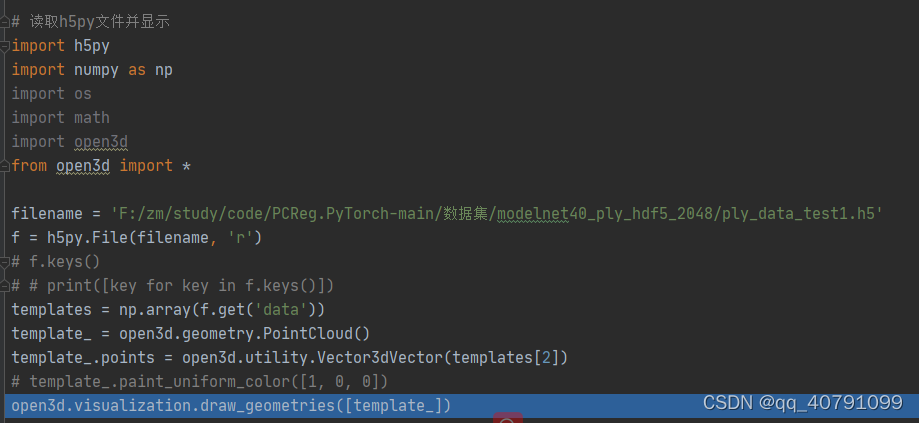
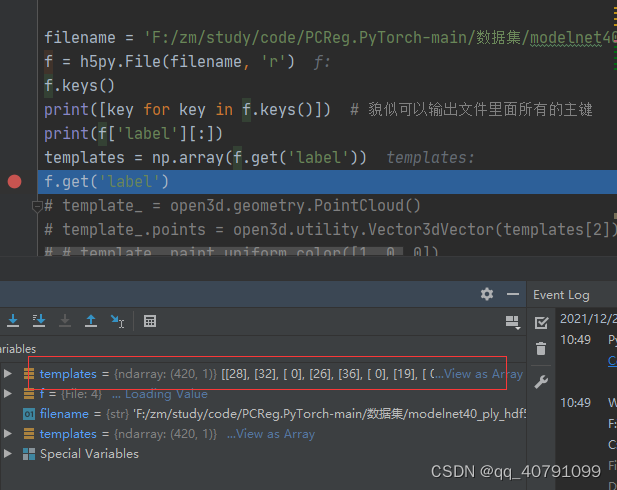
用这个程序可以查看

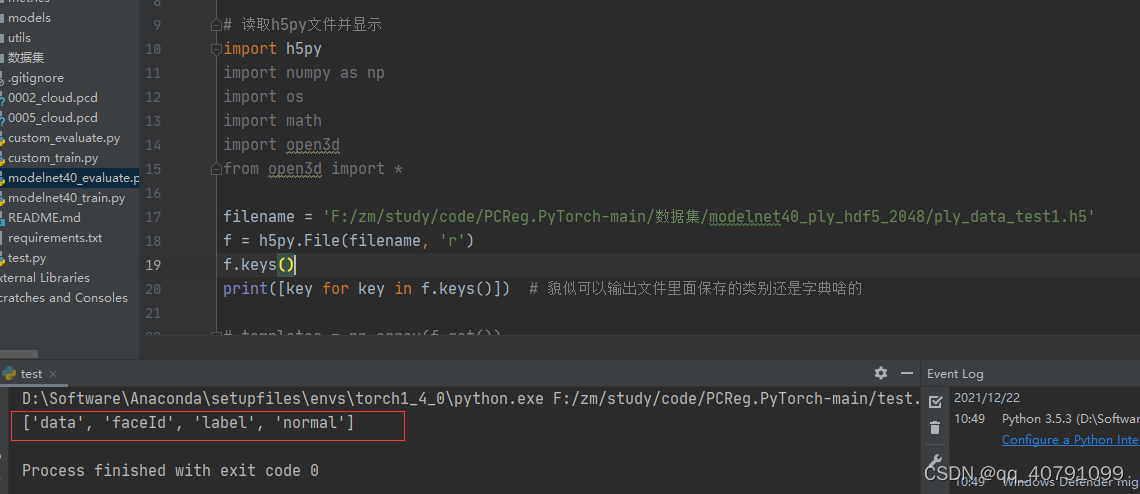
这里可以看到文件里面包含这几类数据:
[‘data’, ‘faceId’, ‘label’, ‘normal’]
data就是点云数据,里面包含2048个模型,一个模型2048个点,每个点有xyz三个值
以ply_data_test1.h5为例:
faceId:420行,2048个列,不知道啥意思
label:420行,1列,不知道啥意思
normal: 420,2048,3
语义分割
S3DIS
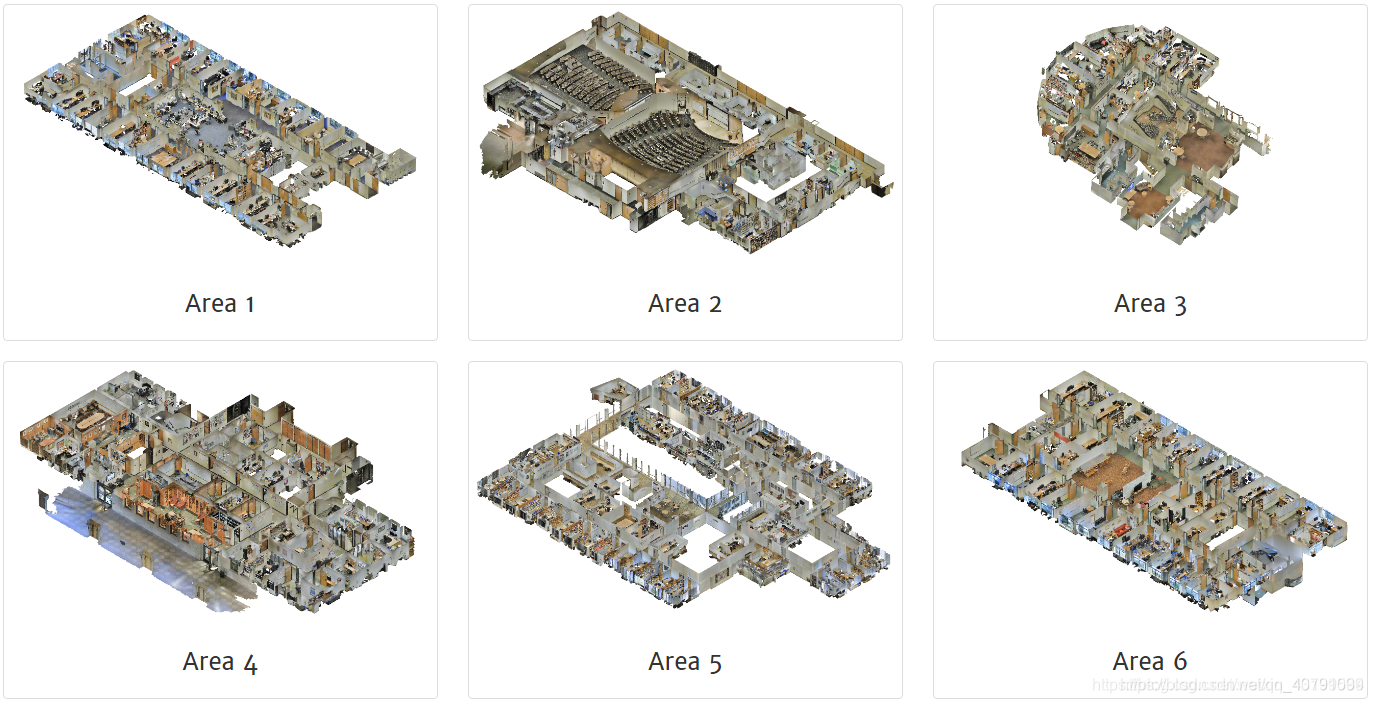
S3DIS是3D室内场景的数据集, 主要用于点云的语义分割任务。主页http://buildingparser.stanford.edu/dataset.html
模型:室内分割数据集,模型为每个房间共计271个,房间内有13类物体。
关于S3DIS的论文是Joint 2D-3D-Semantic Data for Indoor Scene Understanding [arXiv 2017]和3D Semantic Parsing of Large-Scale Indoor Spaces [CVPR 2016]. S3DIS从3个building的6个Area采集得到, Area1, Area3, Area6属于buidling 1, Area2和Area4属于building 2, Area5属于building 3. 点云中每个点都加上了一个予以标签(例如椅子,桌子,地板,墙等共计13个对象)
常用的数据下载格式包括如下三种:
- Stanford3dDataset_v1.2_Aligned_Version.zip, 比如: RandLA-Net
- Stanford3dDataset_v1.2.zip, 比如: CloserLook3D
- indoor3d_sem_seg_hdf5_data.zip, 比如: PointNet(此作者准备好的文件大约1.6G)
(https://blog.csdn.net/weixin_43199584/article/details/105378083)
其中Stanford3dDataset_v1.2_Aligned_Version.zip和Stanford3dDataset_v1.2.zip都是完整场景的数据集(是原网站提供的), 每个点对应6个维度(x, y, z, r, g, b), 而indoor3d_sem_seg_hdf5_data.zip(是pointnet处理后的,所以要在pointnet的github里下或者处理应该)是对原始数据场景的切割,把大场景切割成1m x 1m的block: 完整数据集被切割成了23585个block, 每个block是4096个点, 每个点对应9个维度: 除了x, y, z, r, g, b信息外,剩余的3维是相对于所在大场景的位置(归一化坐标).
indoor3d_sem_seg_hdf5_data.zip
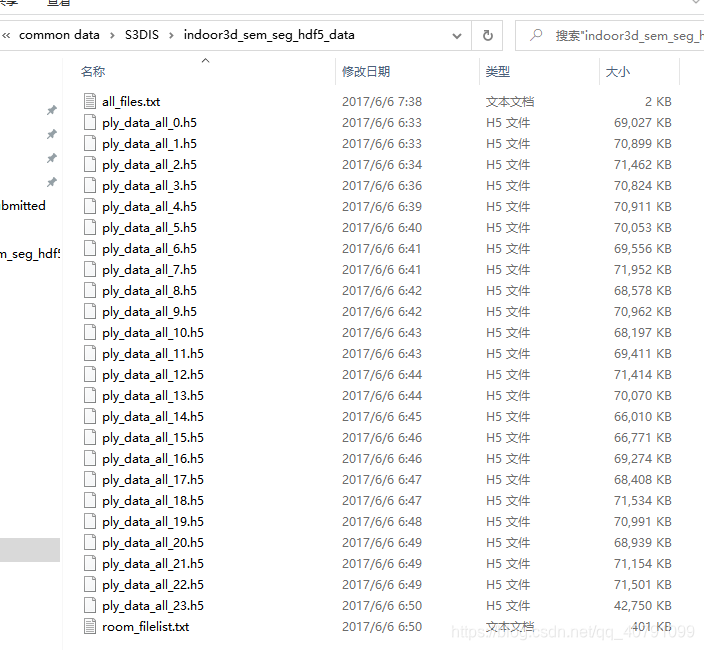
下载下来有这些,
all_files.txt是所有文件名字
room_filelist.txt共23585行,每个block是哪个area的哪个room采集的
pointnet中作者将area6作为test area,area1-5作为训练集
如果需要用其他area准备自己的HDF5文件训练模型,需要下载S3DIS数据集。然后用脚本python collect_indoor3d_data.py重新组织数据,python gen_indoor3d_h5.py产生HDF5文件。
如果不需要batch_inference,即不要测试和可视化,则只需要下载作者制作好的HDF5文件。
(https://blog.csdn.net/qq_43265072/article/details/108552299)
scannet
室内
https://blog.csdn.net/u011622208/article/details/113267187
整个数据1.3T好像
部件分割
ShapeNet
原始点云数据(约1.08G)
制作好的hdf5文件(约346M)














 3247
3247











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









