







1.PID简介
PID是一种不依赖系统模型的控制算法,由于其算法简单,鲁棒性好和可靠性高,被广泛应用于工业过程控制。在工程实际中,当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,这时应用PID控制器最为方便。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
连续控制系统的理想PID控制规律为:

线性控制规律为:

其中:
Kp为比例增益
Ti为积分时间常数
Td为微分时间常数
u(t)为PID控制器的输出信号
e(t)为给定值与测量值的偏差
具体的流程图可表示为:

2.PID基本原理
(1)比例环节P
成比例地反映控制系统的偏差信号,偏差一旦产生,立即产生控制作用以减小偏差。比例控制器的输出u(t)与输入偏差e(t)成正比,能迅速反映偏差,从而减小偏差,但不能消除静态偏差。
静态偏差是指系统控制过程趋于稳定时,给定值与输出量的实测值之差。偏差存在,才能使控制器维持一定的控制量输出,因此比例控制器必然存在着静差。由偏差理论可知,增大P虽然可以减小偏差,但不能彻底消除偏差。
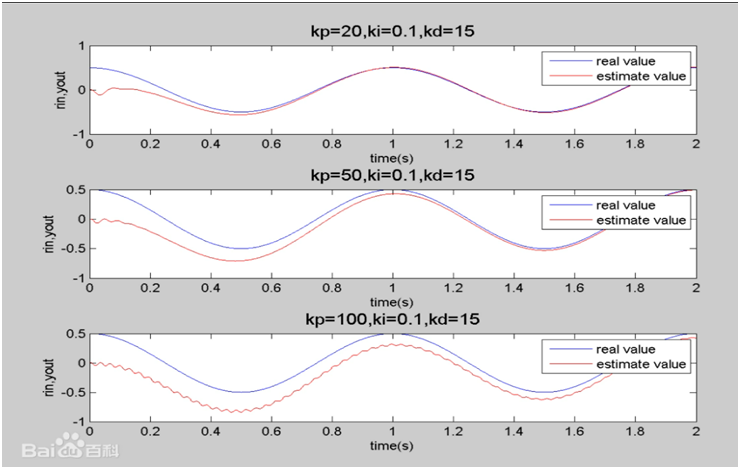
比例控制作用的大小除与偏差e(t)有关之外,还取决于比例系数Kp的大小。比例系数Kp越小,控制作用越小,系统响应越慢;反之,比例系数Kp越大,控制作用也越强,则系统响应越快。但是,Kp过大会使系统产生较大的超调和振荡,导致系统的稳定性能变差。因此,不能将Kp选取过大,应根据被控对象的特性来折中选取Kp,使系统的静差控制在允许的范围内,同时又具有较快的响应速度。由下图可知,太大的Kp导致系统产生较大的震荡。
(2)积分环节
积分环节的作用,主要用于消除稳态误差,提高系统的无差度。积分作用的强弱,取决于积分时间常数Ti,Ti越大积分作用越弱,反之则越强。积分控制作用的存在与偏差e(t)的存在时间有关,只要系统存在着偏差,积分环节就会不断起作用,对输入偏差进行
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4743
4743











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









