






在一些智能驾驶的控制算法中,常常需要使用一些目标,车道线的历史轨迹去做曲线拟合或补偿,此时,我们需要对历史轨迹上的点根据车辆的运动特性,进行相应的坐标旋转平移等变换,得到当前时刻下,较为准确的历史坐标。
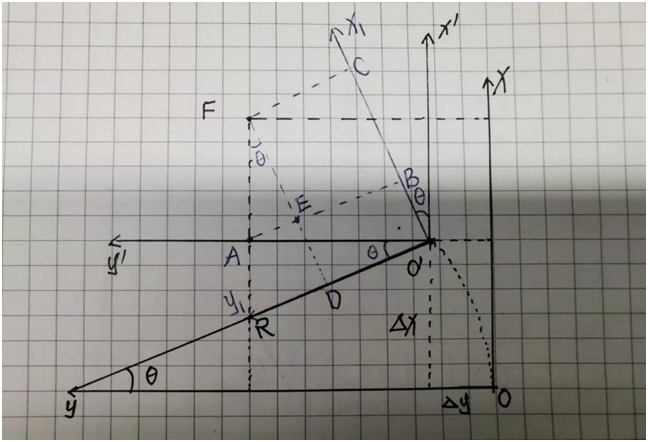
如上图所示,坐标系XOY为当前车辆坐标系,F为当前时刻前车相对自车的位置点,坐标为(x,y)。下一时刻,当车辆从O点走至O’点时,短时间可认为车辆走了一段圆弧,此时半径R = V / yawrate ,角度θ = yawrate * t,则车辆移动的位置偏差为:
Δx = R * sinθ
Δy = R – R * cosθ
建立辅助坐标系X’O’Y’,假设X1O’Y1为下一时刻车辆的坐标系,此时前车的历史轨迹点F在下一时刻坐标系的位置为:X1 = O’C,Y1 = O‘D
已知:
AB =(y – Δy )*cosθ
AF = x – Δx
AE = AF * sinθ =(x – Δx)*sinθ
O’B = (y – Δy )*sinθ
BC = FE = AF * cosθ = ( x – Δx )* cosθ
所以:
X1 = O’C = O’B + BC = (y – Δy )*sinθ + ( x – Δx )* cosθ。
Y1 = O‘D = AB – AE = (y – Δy )*cosθ - (x – Δx)*sinθ
所以历史轨迹在新的坐标系下的坐标可总结为:

















 1118
1118











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









