







 这篇博客详细介绍了如何使用Eigen库在旋转矩阵、旋转向量、欧拉角和四元素之间进行转换。内容包括绕X、Y、Z轴的旋转,以及各种转换的示例和实验结果。此外,还涉及到四元素在物体转向中的应用。
这篇博客详细介绍了如何使用Eigen库在旋转矩阵、旋转向量、欧拉角和四元素之间进行转换。内容包括绕X、Y、Z轴的旋转,以及各种转换的示例和实验结果。此外,还涉及到四元素在物体转向中的应用。
参考资料
旋转矩阵到欧拉角
Eigen旋转矩阵,旋转向量,欧拉角,四元数互相转换的示例
1 绕X、Y、Z轴旋转时的旋转向量为:
注意:
vector中放置的旋转轴分别为x、y、z
Eigen::AngleAxisd rotation_vector(alpha,Vector3d(x,y,z))
初始化旋转向量,绕X、Y、Z轴逆时针旋转pi
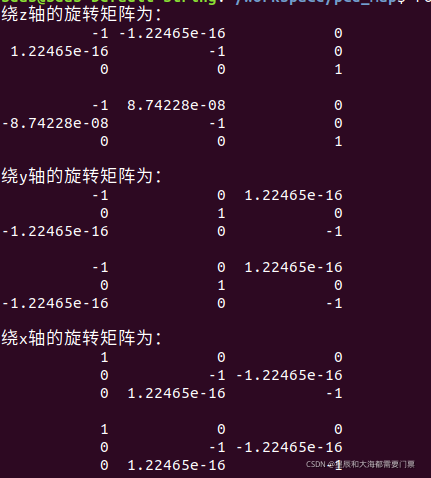
cout<<"绕z轴的旋转矩阵为:"<<endl;
Eigen::AngleAxisd Rotation_vector(M_PI, Eigen::Vector3d(0,0,1));
cout<<Rotation_vector.matrix()<<endl;
cout<< " "<<endl;
Eigen::AngleAxisf Rotation_vector_1(M_PI,Eigen::Vector3f::UnitZ());
cout<<Rotation_vector_1.matrix()<<endl;
cout<< " "<<endl;
cout<<"绕y轴的旋转矩阵为:"<<endl;
Eigen::AngleAxisd Rotation_vector1(M_PI, Eigen::Vector3d(0,1,0));
cout<<Rotation_vector1.matrix()<<endl;
cout<< " "<<endl;
Eigen::AngleAxisd Rotation_vector1_1(M_PI, Eigen::Vector3d::UnitY());
cout<<Rotation_vector1_1.matrix()<<endl;
cout<< " "<<endl;
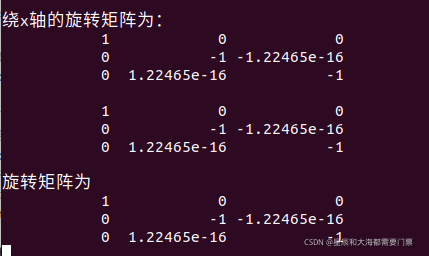
cout<<"绕x轴的旋转矩阵为:"<<endl;
Eigen::AngleAxisd Rotation_vector2(M_PI, Eigen::Vector3d(1,0,0));
cout<<Rotation_vector2.matrix()<<endl;
cout<< " "<<endl;
Eigen::AngleAxisd Rotation_vector2_1(M_PI, Eigen::Vector3d::UnitX());
cout<<Rotation_vector2_1.matrix()<<endl;
cout<< " "<<endl;
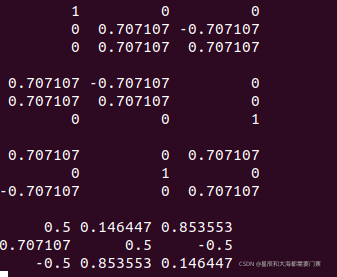
实验结果:
1.1 将1中的旋转向量转换为旋转矩阵形式
将上面绕x轴旋转pi的旋转向量转换为旋转矩阵形式,用罗德里格斯公式
// 将旋转向量转换为旋转矩阵
Eigen::Matrix3d Rotation_matrix=Rotation_vector2_1.matrix();
cout<<"旋转矩阵为"<<endl;
cout<<Rotation_matrix<<endl;
实验结果
1.1.1 将1.1中的旋转矩阵转旋转向量
cout<<"绕z轴的旋转向量为:"<<endl;
Eigen::AngleAxisd Rotation_vector(M_PI, Eigen::Vector3d(0,0,1));
// // 将旋转向量转换为旋转矩阵
Eigen::Matrix3d Rotation_matrix=Rotation_vector.matrix();
// 将旋转矩阵转换为旋转向量
Eigen::AngleAxisd R_vector(Rotation_matrix);
cout<<"旋转向量为:"<<endl;
cout<<R_vector.matrix()<<endl;
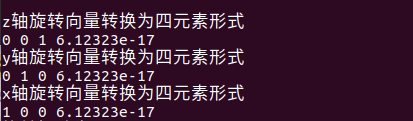
1.2 将1中的旋转向量转换为四元素形式
// 将旋转向量转换为四元素形式
cout<<"z轴旋转向量转换为四元素形式"<<endl;
Eigen::Quaterniond q_z(Rotation_vector);
cout<<q_z.x()<<" "<<q_z.y()<<" "<<q_z.z()<<" "<<q_z.w()<<endl;
cout<<"y轴旋转向量转换为四元素形式"<<endl;
Eigen::Quaterniond q_y(Rotation_vector1);
cout<<q_y.x()<<" "<<q_y.y()<<" "<<q_y.z()<<" "<<q_y.w()<<endl;
cout<<"x轴旋转向量转换为四元素形式"<<endl;
Eigen::Quaterniond q_x(Rotation_vector2);
cout<<q_x.x()<<" "<<q_x.y()<<" "<<q_x.z()<<" "<<q_x.w()<<endl;
1.2.1 将1.1中的旋转矩阵转换为四元素形式
cout<<"旋转矩阵转换为四元素2"<<endl;
Eigen::Quaterniond q2(Rotation_matrix);
cout<<q2.x()<<" "<<q2.y()<<" "<<q2.z()<<" "<<q2.w()<<endl;
1.3 将1中的旋转向量转换为欧拉角形式
注意:xyz分别对应RPY(0,1,2)
下边0,1,2只不过是这三个角的显示顺序不同而已
旋转向量转为欧拉角,顺序为y-z-x,也即yaw pitch roll
// 旋转向量转换为欧拉角
cout<<"y_旋转向量转换为欧拉角为:"<<endl ;
// cout<<Rotation_vector_1.matrix().eulerAngles(2,1,0)<<endl;
cout<<" "<<endl;
cout<<Rotation_vector1.matrix().eulerAngles(1,2,0)<<endl;
等价于
rotation_matrix = AngleAxisd(euler_angles[0], Vector3f::UnitY())
* AngleAxisd(euler_angles[1], Vector3f::UnitZ())
* AngleAxisd(euler_angles[2], Vector3f::UnitX());
其表示先绕X轴旋转,再绕Z轴旋转,再绕Y轴旋转
注意:坐标轴方向
X轴朝前;Y轴朝左,Z轴朝右
1.3.1 将1.1中的旋转矩阵转换为欧拉角形式
代码同1.3
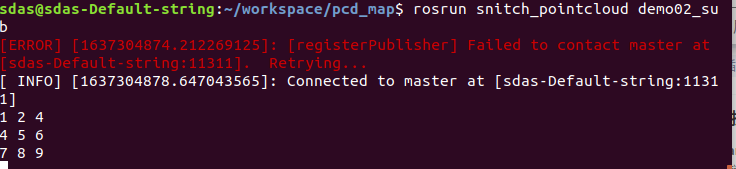
1.4 初始化旋转矩阵
// 初始化旋转矩阵
Eigen::Matrix3d rotation_matrix;
rotation_matrix<<1,2,4,4,5,6,7,8,9;
cout<<rotation_matrix<<endl;
1.5 欧拉角
1.5.1 初始化欧拉角
// 初始化欧拉角
double roll=M_PI/4,pitch=M_PI/4,yaw=M_PI/4;
Eigen::Vector3d eulerAngle(roll,pitch,yaw);
1.5.2 欧拉角转旋转向量
Eigen::AngleAxisd rollAngle(Eigen::AngleAxisd(eulerAngle(0), Eigen::Vector3d(1,0,0)));
Eigen::AngleAxisd pitchAngle(Eigen::AngleAxisd(eulerAngle(0), Eigen::Vector3d(0,0,1)));
Eigen::AngleAxisd yawAngle(Eigen::AngleAxisd(eulerAngle(0), Eigen::Vector3d(0,1,0)));
Eigen::AngleAxisd rotation_vector;
rotation_vector=yawAngle*pitchAngle*rollAngle;
实验结果:
1.5.3 欧拉角转旋转矩阵
Eigen::Matrix3d rotation_matrix;
rotation_matrix=yawAngle*pitchAngle*rollAngle;
cout<<rotation_matrix<<endl;
1.5.4 欧拉角转四元素
quaternion=yawAngle*pitchAngle*rollAngle;
cout<<"欧拉角转四元素"<<endl;
cout<<quaternion.x()<<endl;
cout<<quaternion.y()<<endl;
cout<<quaternion.z()<<endl;
cout<<quaternion.w()<<endl;
1.6 四元素
1.6.1 四元素转欧拉角
cout<<"四元素转欧拉角"<<endl ;
Eigen::Vector3d eulerAngle1=quaternion.matrix().eulerAngles(1,0,2);
cout<<eulerAngle1.matrix()<<endl;
发现实验结果有问题:
输入的姿态角
double roll=M_PI/4,pitch=M_PI/4,yaw=M_PI/4;
姿态角转四元素
0.191342
0.46194
0.191342
0.844623
2 四元素知识点
实现的功能:1个物体以一定的速度转向目标物体
Quaternion.Slerp(Quaternion from ,Quaternion to, float t)叫球面线形插值
@param from 为起始方向
@param to 为终止方向
@ param t = 0.1 可以理解为速度,通常取值为0< t <= 1


















 932
932

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











