







 超级会员免费看
超级会员免费看
文章目录
1、什么是ST图
这里简单介绍一下Apollo算法中的ST图,这是一个以时间(time)为横轴,规划路径的距离(s)为纵轴的坐标系,如下图所示。构建此坐标系的目的一是能够将速度规划投影至此二维平面中来,从而可以采用优化的方式对其进行求解;二是可以很好地将障碍物的预测轨迹投影至该平面,从而做出合理的决策;三是通过s值能够构建速度与路径之间的关系,从而可以更好地将两者最终融合成一条轨迹。
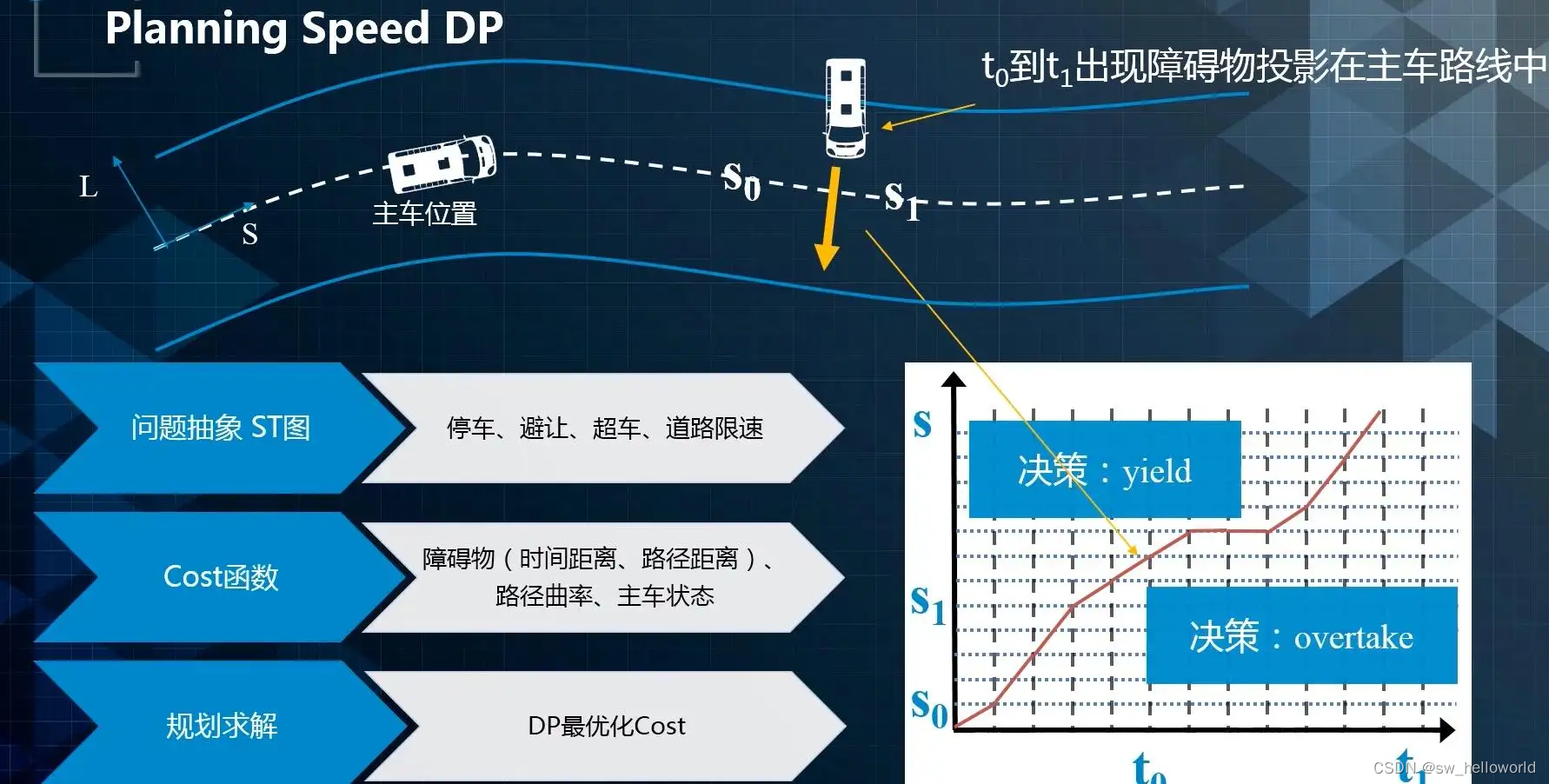
在ST图中,斜率其实就是表示s值对于时间的导数即速度,斜率越大,则表示速度越高;s对于时间的二阶导则表示加速度。这里其实就和SL坐标系下对于路径的规划十分类似了,只是坐标系变换了下而已,优化的变量就是s,s一阶导,s二阶导。
2、什么是SL图


 订阅专栏 解锁全文
订阅专栏 解锁全文
















 3244
3244











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











