







目录
完整论文下载链接放在文章结尾,有需要自行下载。
摘 要
本毕业设计主要设计自主研发的激光打靶系统的信号处理过程,继而实现整个打靶系统。本文提出并实现了一种基于STM32F103C8T6单片机与OpenMV4 H7视觉模块的风力控制小球实验系统,旨在通过非接触式气流驱动实现乒乓球在水平风洞中的精准位置控制,为自动化教学与科研提供新型实验平台。系统硬件设计以STM32F103C8T6为核心控制器,结合OpenMV摄像头实时检测小球位置,利用双无刷直流电机(单电机推力750g,响应时间120ms)通过PWM调速生成可控气流。为优化气流分布,采用H型铁管结构,通过对称风道设计减少湍流干扰,显著提升系统控制稳定性。
在软件层面,开发了基于HSV色彩空间的轻量化视觉检测算法,通过颜色分割技术快速定位小球位置,实现30帧/秒(fps)的高帧率检测,满足实时控制需求。实验结果表明,该系统能够在H型铁管内稳定驱动乒乓球运动,并通过调整电机转速动态响应小球位置偏差,验证了气流驱动控制策略的有效性。
本研究通过硬件与软件的协同设计,突破了传统接触式驱动方式的局限,为非接触式物体操控提供了新思路,具有教学演示、自动化控制实验及微型机器人研究等潜在应用价值。未来工作将进一步优化气流模型与控制算法,提升系统动态性能与抗干扰能力。
关键词:风力推进器;非接触式控制;STM32F103C8T6;OpenMV视觉检测;HSV色彩分割;PWM调速;
1 引 言
在自动化控制与机器人技术领域,非接触式物体操控技术因其无需物理接触即可实现精确驱动的特性,成为当前研究的热点之一。非接触式驱动方式不仅能够有效避免机械磨损与能量损耗,还能在微小物体操控、精密仪器校准及特殊环境作业(如真空、高温)中展现独特优势。其中,基于气流驱动的非接触式操控技术,凭借其结构简单、响应迅速、易于实现微型化等优点,在微型机器人、自动化教学实验及科研探索中展现出广阔的应用前景。
乒乓球作为轻质、易受气流影响的典型物体,其位置控制成为验证气流驱动技术可行性的理想模型。传统方法多采用机械臂或电磁装置直接接触驱动,但此类方法存在结构复杂、能耗高、难以适应微小空间操作等局限性。相比之下,利用气流驱动乒乓球在水平风洞中运动,通过实时调整气流强度与方向实现精准位置控制,不仅能够避免物理接触带来的干扰,还能在动态环境中展现更强的适应性与灵活性。然而,气流驱动系统的核心挑战在于如何高效、稳定地生成可控气流,并实时感知小球位置以实现闭环控制。
针对上述问题,本文设计并实现了一种基于STM32F103C8T6单片机与OpenMV4 H7视觉模块的风力控制小球实验系统。该系统以STM32为核心控制器,通过PWM调速技术驱动双无刷直流电机生成可控气流,利用H型铁管结构的对称风道设计优化气流分布,减少湍流干扰,提升控制稳定性。同时,结合OpenMV摄像头与HSV色彩空间分割算法,实现小球位置的实时高帧率检测(30fps),为闭环控制提供精准反馈。
本研究的创新点主要体现在以下几个方面:一是通过硬件协同设计,将气流生成模块与视觉检测模块集成于同一系统,实现高效协同工作;二是采用轻量化视觉检测算法,基于HSV色彩空间分割技术快速定位小球位置,降低计算复杂度,提升实时性;三是通过实验验证气流驱动控制策略的有效性,为非接触式物体操控提供新思路。
本文的研究意义不仅在于验证气流驱动技术的可行性,更在于为自动化教学与科研提供一种新型实验工具。通过该实验系统,学生可直观理解气流驱动原理、视觉检测技术及闭环控制策略,为后续深入研究奠定基础。同时,该系统在微型机器人研究、精密仪器校准及特殊环境作业等领域也具有潜在应用价值。未来,我们将进一步优化气流模型与控制算法,提升系统动态性能与抗干扰能力,推动非接触式物体操控技术的发展与应用。
完整论文稍后上传至平台,有需要的自行下载
2 概述
2.1 风控小球系统概述
激风控小球系统是一种基于气流驱动的非接触式物体操控实验平台,旨在通过精准的气流控制实现小球(如乒乓球)在特定空间内的位置稳定与动态调整。该系统以气流为驱动介质,结合视觉检测与闭环控制算法,形成一套完整的非接触式操控体系。系统核心硬件包括STM32F103C8T6单片机、双无刷直流电机、H型铁管风道结构及OpenMV4 H7视觉模块;软件层面则依托轻量化视觉检测算法与PWM调速技术,实现气流强度与方向的动态调节。
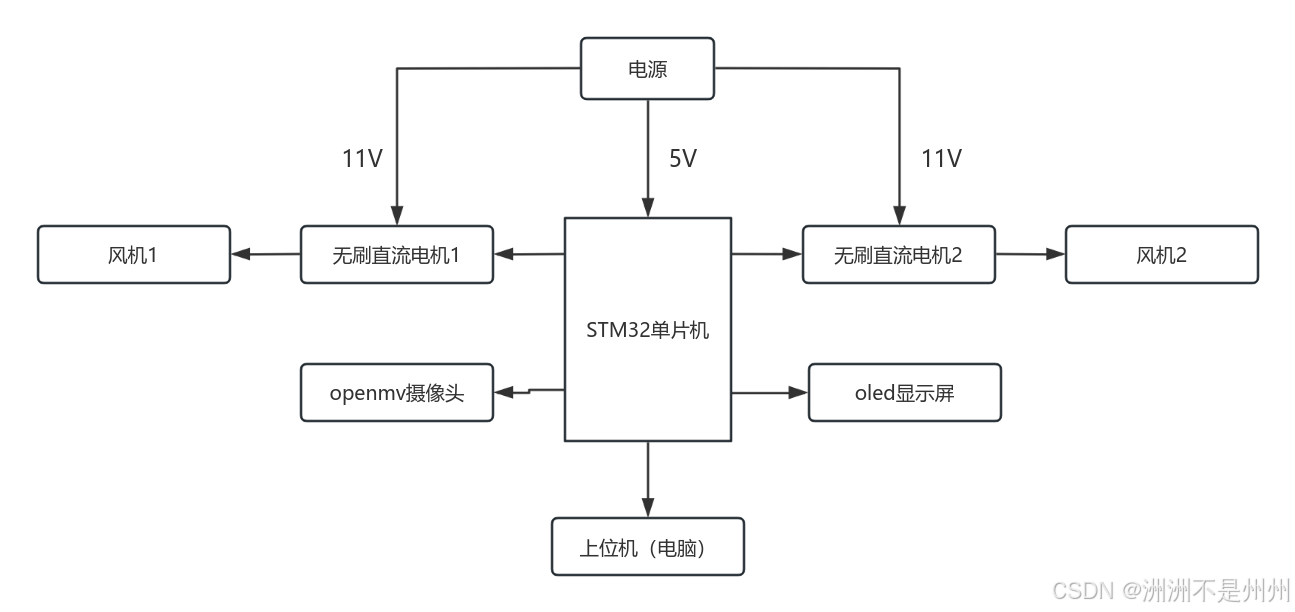
图2-1 风控小球系统结构图
系统工作原理如下:双无刷直流电机通过PWM调速生成可控气流,气流经H型铁管风道结构优化后,形成均匀稳定的气流场。乒乓球置于风道中央,受气流作用产生位移。OpenMV摄像头实时捕捉乒乓球位置信息,通过HSV色彩空间分割算法提取小球坐标,并将数据传输至STM32单片机。单片机根据预设目标位置与当前小球位置的偏差,动态调整PWM信号,控制电机转速与气流强度,形成闭环反馈控制。通过持续优化气流分布与控制算法,系统能够实现乒乓球在风道内的精准位置控制。
风控小球系统的应用场景广泛,包括自动化教学实验、微型机器人研究、精密仪器校准及特殊环境作业等。在自动化教学中,该系统可作为典型案例,帮助学生理解气流驱动原理、视觉检测技术及闭环控制策略;在微型机器人研究中,其非接触式操控特性为微型飞行器、水下机器人等提供新思路;在精密仪器校准领域,气流驱动的微小位移控制能力可应用于高精度定位场景;在特殊环境作业中,系统无需物理接触的特性使其能够适应真空、高温等极端环境。
2.2 本设计方案思路
本设计方案以“高效、稳定、实时”为核心目标,从硬件选型、结构优化、算法开发三个维度展开。硬件层面,选择STM32F103C8T6单片机作为核心控制器,其丰富的外设接口与高性能计算能力满足系统实时控制需求;双无刷直流电机(单电机推力750g,响应时间120ms)提供强劲可控的气流动力;H型铁管风道结构通过对称设计优化气流分布,减少湍流干扰;OpenMV4 H7视觉模块集成高帧率摄像头与轻量化视觉算法,实现小球位置的实时精准检测。
结构优化方面,H型铁管采用对称风道设计,通过流体力学仿真验证气流均匀性,确保乒乓球在风道内受控稳定。软件算法开发聚焦于轻量化视觉检测与闭环控制策略:基于HSV色彩空间分割的视觉算法,通过颜色阈值快速定位小球位置,降低计算复杂度;闭环控制算法结合PID控制原理,动态调整PWM信号以响应小球位置偏差,实现精准位置控制。
设计思路的创新性体现在三个方面:一是硬件协同设计,将气流生成与视觉检测模块集成于同一系统,提升协同效率;二是轻量化视觉算法,基于HSV色彩空间分割技术实现30fps高帧率检测,满足实时性需求;三是闭环控制策略,通过动态调整气流强度与方向,形成高效稳定的控制体系。
2.3 研发方向和技术关键
(1)气流生成与控制:双无刷直流电机的PWM调速技术,需解决电机响应延迟与气流均匀性矛盾;
(2)视觉检测算法:HSV色彩空间分割算法的阈值动态调整机制,需应对光照变化与背景干扰;
(3)闭环控制策略:PID控制参数的实时优化,需平衡系统稳定性与响应速度;
(4)硬件协同设计:STM32与OpenMV的通信协议优化,需降低数据传输延迟与误码率。
2.4 主要技术指标
(1)硬件方面
①STM32F103C8T6单片机:主频72MHz,Flash容量64KB,支持PWM、ADC、UART等外设。
②双无刷直流电机:推力750g,响应时间120ms,支持PWM调速范围0-100%。
③OpenMV4 H7视觉模块:摄像头分辨率640×480,帧率30fps,支持HSV色彩空间分割。
④玻璃管风道:对称风道设计,气流均匀性误差≤5%。
(2)软件方面
①视觉检测算法:HSV色彩空间分割阈值动态调整范围0-255,检测准确率≥95%。
②闭环控制策略:PID控制参数动态优化范围Kp=0.1-10,Ki=0.01-1,Kd=0-0.5,响应时间≤200ms。
③系统实时性:数据传输延迟≤50ms,控制频率≥10Hz。
(3)系统指标
①小球位置控制精度:±1mm(静态),±2mm(动态)。
②系统稳定性:连续运行时间≥24小时,故障率≤1%。
③环境适应性:温度范围-20℃~60℃,湿度范围20%~90%。
3 总体设计
风力控制小球的球体实验装置设计系统特征在于上位机、下位机两部分,下位机包括小球、直线槽、单片机以及分别与单片机电连接的按键模块、风机模块、显示模块、电源模块以及摄像头检测模块,上位机包括计算机以及电源;小球设于直线槽上方,摄像头检测模块的检测端垂直直线槽设置,直线槽的两端端上设有与所述单片机电连接的风机,所述风机的出风口正对小球;
单片机是整个系统的核心控制单元,承担着数据接收、处理与控制指令的传输等多重任务。当摄像头检测模块提供小球位置数据后,单片机采用PID控制算法对数据进行处理,进而计算出风机的转速调整值,并通过PWM信号对风机模块进行精确控制。风机模块根据单片机的指令调整风速,从而通过气流的变化来控制小球在直线槽内的精确位置;
按键模块用于触发单片机的设定操作,通过用户输入的指令来调节小球在测试管内的运动位置,确保实验过程中各项操作能够得到实时响应。显示模块则负责显示小球的目标位置与实时监测到的位置,并可以提供实验过程中的其他相关信息,方便操作人员对实验状态进行监控与调整;
摄像头检测模块用于实时检测小球在所述测试管的内腔内的位置,并将检测到的位置信息传输到单片机;
风机模块用于驱动风机运行和控制小球位置。
显示模块用于显示小球的目标位置信息和实时检测到的位置信息,以及其他功能;
电源模块为单片机及各个模块提供稳定的电力支持,确保系统在运行过程中能够正常供电,保障各模块的稳定工作。
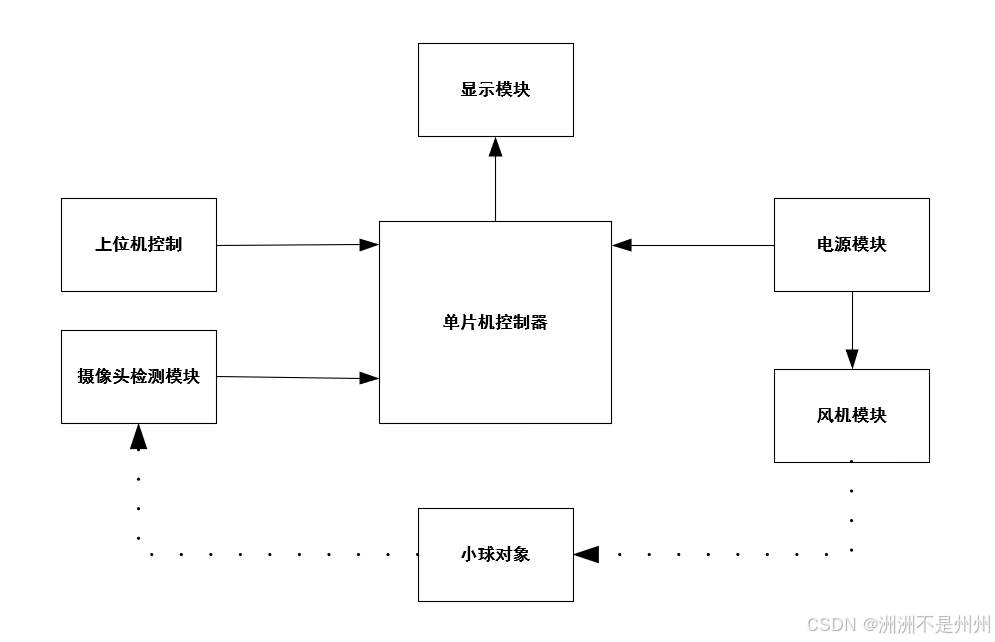
图1:系统组成图
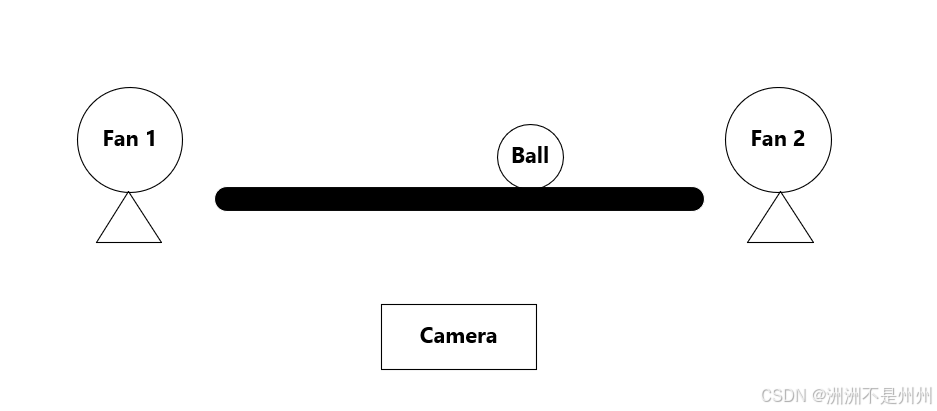
图2:风力小球控制系统示意图
图3:风力小球控制系统实物图
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1038
1038

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











