




 该文介绍了如何使用ROS和turtlebot实现从稀疏点云地图到稠密点云地图,再到八叉树地图和二维栅格地图的转换,并最终进行路径规划导航。过程中涉及ORBSLAM2、点云保存、八叉树转换、滤波算法以及避障导航的实践。文章指出当前存在的问题是八叉树地图的离线转换和滤波算法的优化,以及依赖于硬件的避障导航,提出未来改进的方向。
该文介绍了如何使用ROS和turtlebot实现从稀疏点云地图到稠密点云地图,再到八叉树地图和二维栅格地图的转换,并最终进行路径规划导航。过程中涉及ORBSLAM2、点云保存、八叉树转换、滤波算法以及避障导航的实践。文章指出当前存在的问题是八叉树地图的离线转换和滤波算法的优化,以及依赖于硬件的避障导航,提出未来改进的方向。
最近在完成基于稀疏点云地图实现turtlebot导航的工作,大致实现路线为稀疏地图-》稠密点云地图-》离线八叉树地图-》二维栅格地图-》保存地图并基于turtlebot完成真实环境下的路径规划导航。遂将查阅的资料归纳整理。
环境:ubtuntu16
-
稠密点云地图
(1)源码
在ORBSLAM2构建稀疏点云地图的基础上增加了单独的稠密点云pcl显示线程
https://github.com/xiaobainixi/ORB-SLAM2_RGBD_DENSE_MAP.git(2)编译运行
此处记得提前将原ORBSLAM2的词袋模型粘贴过来
chmod +x build.sh
./build.sh
mkdir build
cd build
cmake ..
make -j
./run/rgbd_tum Vocabulary/ORBvoc.bin path_to_settings path_to_sequence path_to_association这里以TUM数据集 rgbd_dataset_freiburg3_long_office_household序列为例
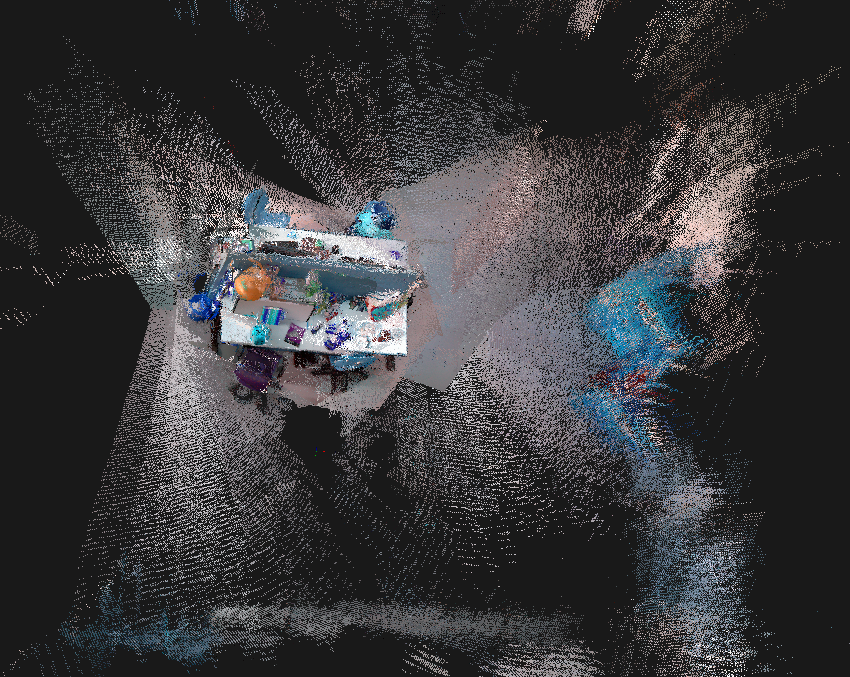
(3)保存pcd文件
在viewer线程中加入以下代码用于本地保存稠密点云地图
pcl:io:savePCDFile(“./pointcloud.pcd”,*globalmap)-
八叉树地图
这里主要实现离线转换,后续可考虑换成实时转换,可参考:
https://github.com/IATBOMSW/ORB-SLAM2_DENSE.git(1)准备工作
octomap工具包安装
sudo apt-get install ros-indigo-octomap-ros
sudo apt-get install ros-indigo-octomap-msgs
sudo apt-get install ros-indigo-octomap-server
sudo apt-get install ros-indigo-octomap-rviz-plugins下载源码
(2)具体实现
将publish_pointcloud.cpp中pcd的路径改为上一节本地保存的pcd文件路径
nh.param<std::string>("path", path, "./test.pcd");demo.launch同理
<param name="path" value="./test.pcd" type="str" />另外,需注意demo.launch与publish_pointcloud.cpp中发布的话题需要对应上
启动命令
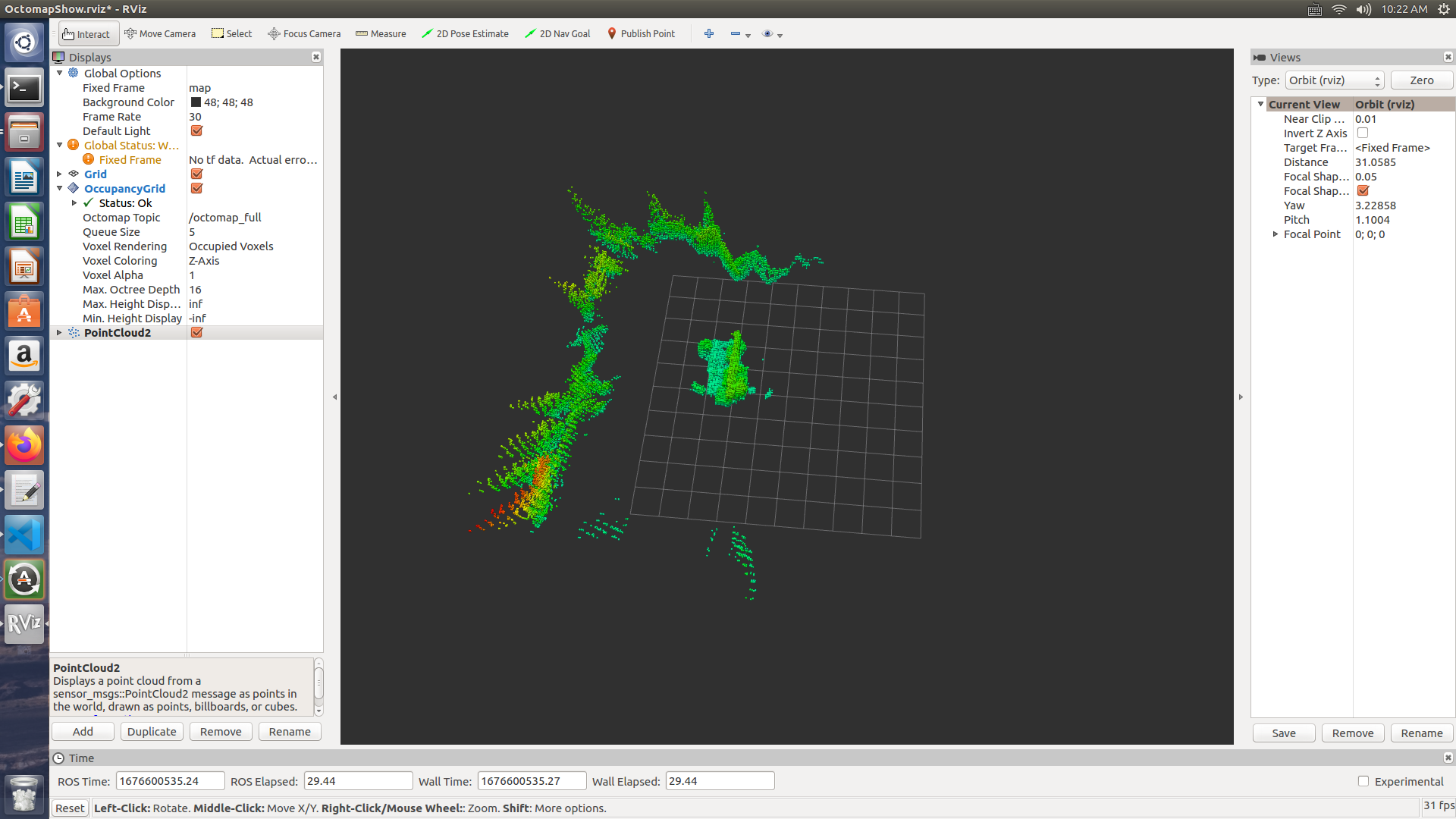
roslaunch publish_pointcloud demo.launch此时已经将稠密点云地图发布到指定的 topic 上,并完成八叉树转换,这里可通过可视化工具 rviz 进行显示
点击rviz中add,添加PointCloud2模块,设置topic为代码中你设置的话题,可通过rostopic echo 来检查是否有相应话题输出,此时可显示pcd文件的点云地图

添加OccupancyGrid 模块,设置 topic 为/octomap_full,即可看到点云地图转换后的八叉树地图
具体实现可参考:Octomap 在ROS环境下实时显示_ros octomap_熊猫飞天的博客-CSDN博客
-
二维栅格地图
(1)加载话题实现
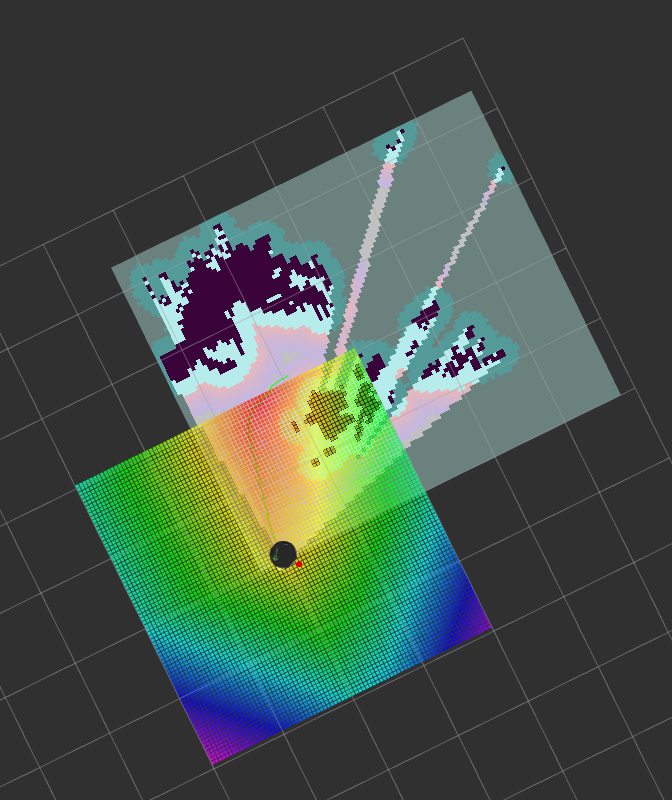
添加OccupancyMap 模块,设置 topic 为/octomap_full,即可看到八叉树地图转换后的二维栅格地图

这里仅展示滤除冗余信息之后的效果,黑色代表占据状态,即障碍物
(2)可能遇到的问题:
-
地面信息未滤除
解决方法很多,可以在生成点云地图的时候加滤波算法
这里介绍一个简单的方法:
修改demo.launch中点云地图z轴的阈值,将z轴的最小值微调至刚好把地面信息滤除即可。
<!-- max/min height for occupancy map, should be in meters -->
<param name="pointcloud_max_z" value="1000" />
<param name="pointcloud_min_z" value="0" />但是有个缺点,针对不同场景的点云地图,可能需要设置不同的阈值,比较麻烦,有时间推荐加滤波算法进去
具体的滤波算法可参考这里的工作:
https://github.com/IATBOMSW/ORB-SLAM2_DENSE-
点云地图坐标系错误,导致八叉树无法正确2D投影到栅格地图
这里可以通过pcl中的transforms完成空间中的坐标系转换
Eigen::Affine3f transform = Eigen::Affine3f::Identity();
//transform.scale(1/2);
transform.translate(Eigen::Vector3f(0,0,1));
transform.translate(Eigen::Vector3f(0,0,1));
transform.translate(Eigen::Vector3f(0,0,1));
transform.translate(Eigen::Vector3f(0,0,1));
transform.rotate(Eigen::AngleAxisf(-M_PI/2,Eigen::Vector3f(1,0,0)));
transform.rotate(Eigen::AngleAxisf(-M_PI/8,Eigen::Vector3f(1,0,0)));
transform.translate(Eigen::Vector3f(0,1,0));
transform.translate(Eigen::Vector3f(0,1,0));
pcl::transformPointCloud(cloud,cloud,transform);translate、rotate分别为坐标系的位移和旋转
-
基于turtlebot完成真实环境下的路径规划导航
(1)保存地图
将上述二维栅格地图进行本地保存,其中/projected_map是octomap_server中二维栅格地图默认发布的名字
rosrun map_server map_saver map:=/projected_map -f map1此时会生成pgm文件和yaml文件,其中yaml文件中机器人初始位置的Z轴需要改成0,因为此时机器人处于二维世界
根据上述步骤,在真实环境下亦可通过SLAM系统稀疏建图并最终转换成二维栅格地图
(2)加载地图
此时启动turtlebot2机器人
roslaunch turtlebot_bringup minimal.launch加载上述步骤中保存的二维栅格地图文件
roslaunch turtlebot_navigation amcl_demo.launch map_file:=path/map1.yamlrviz实时显示二维栅格导航地图和机器人位置
roslaunch turtlebot_rviz_launchers view_navigation.launch(3)避障导航
此时开启算法定位(注:此处并没有开启kinect v2实现获取深度速度并转为激光数据)
故这块应该会报红,但是不妨碍机器人可以避障导航
roslaunch kinect2_gmapping.launch-
实例效果
-
总结
整个过程都是基于前人的工程化工作,实现起来还是不难的,但是可以看出整个过程还是存在一些问题
(1)八叉树离线
这里实现方式还是以离线为主,导致整体步骤不连贯,后续有时间将实时八叉树建图加进去
(2)滤波算法
在实现稠密点云地图时应考虑加入有效的滤波算法,而不是手动调整阈值,比较麻烦
(3)纯视觉导航
这块还是借用了kinect2_gmapping算法,感觉整体过程还是比较粗糙的,后续考虑纯视觉自动避障导航

















 1486
1486

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









