







Abb工业机器人 自己测试工具的重量
1.先恢复一个干净的Abb机人系统,再用程序编辑器中创建 一个程序文件。
2.在手动控制页面中,选择 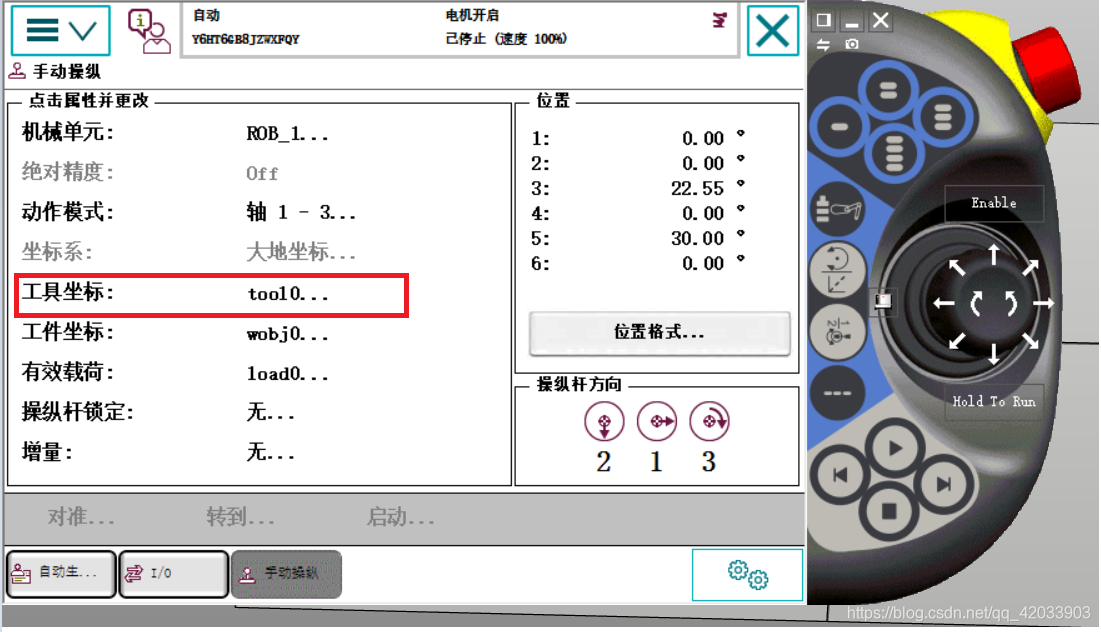
然后我们创建一个工具的Tcp:
创建时只需要改动里面的mass值,这个mass值先随便定义 。如果你的机器是拿来拿取大型物件的,你就要创建一个有效载荷。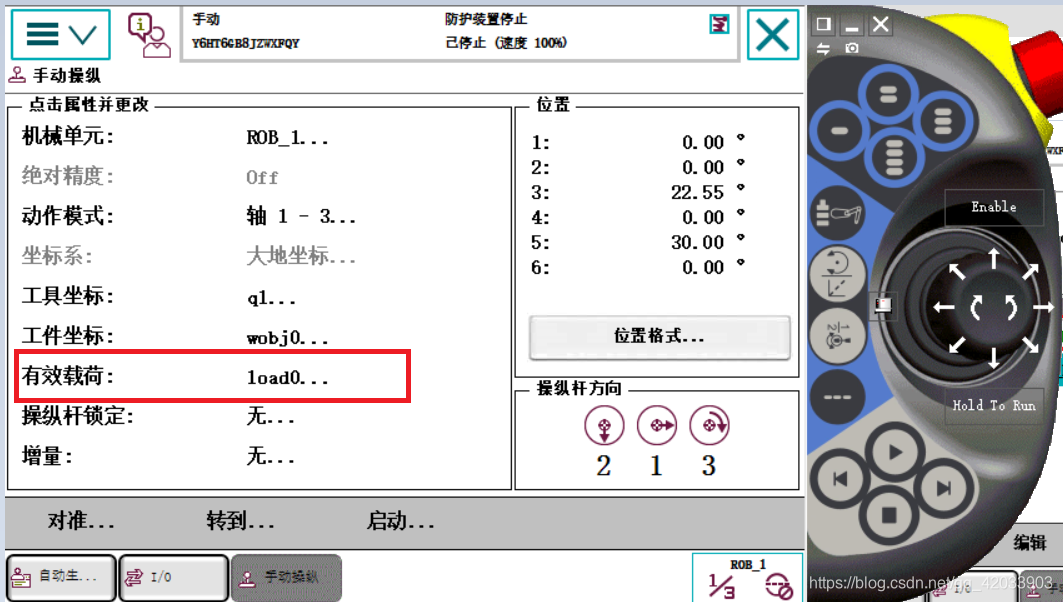
因为我是用的虚拟模拟器,所以我用的是原有的有效载荷。在这些都创建完成的情况下 ,我们就可以返回到程序编辑器中。
将我们的光标移动到mian中。然后在调用例行程序,如图所示:

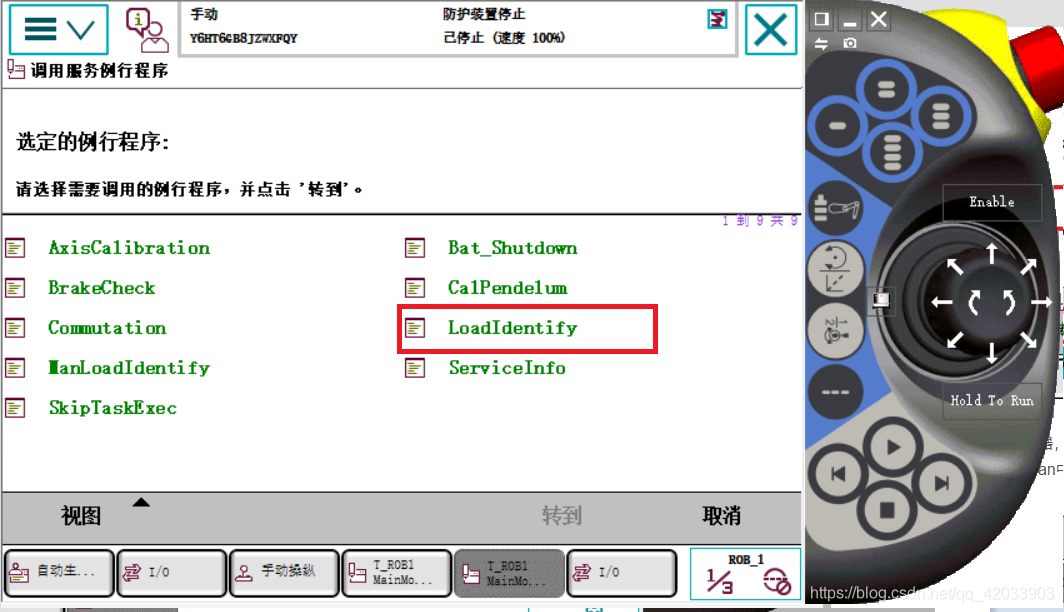
然后会进入到一下界面: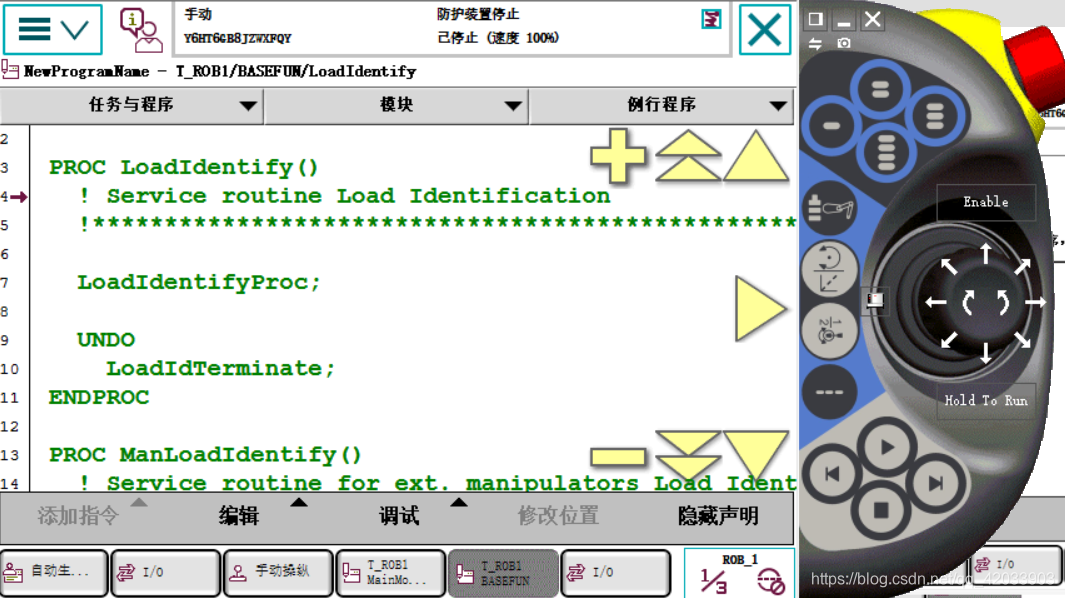
这个时候我们先手动运行程序。
程序刚运行会弹出这个对话框: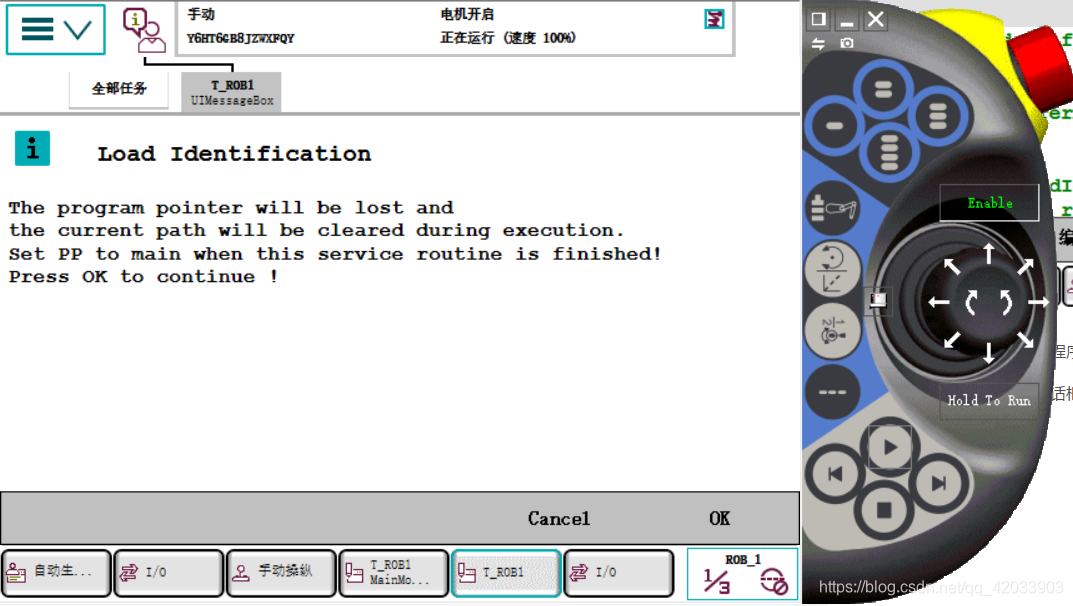
点击ok进入下一步。
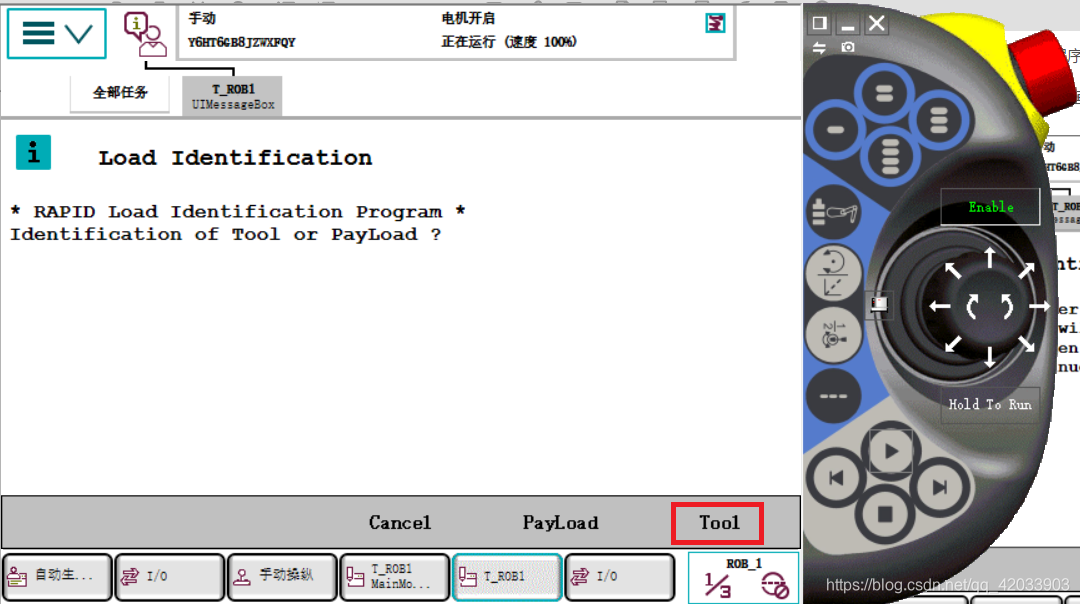
在点击tool,注意在这个的时候你的工具坐标一定要是你新创建的,如果不是那你就要去手动操作纵下更改你的工具坐标。
然后继续点击ok。
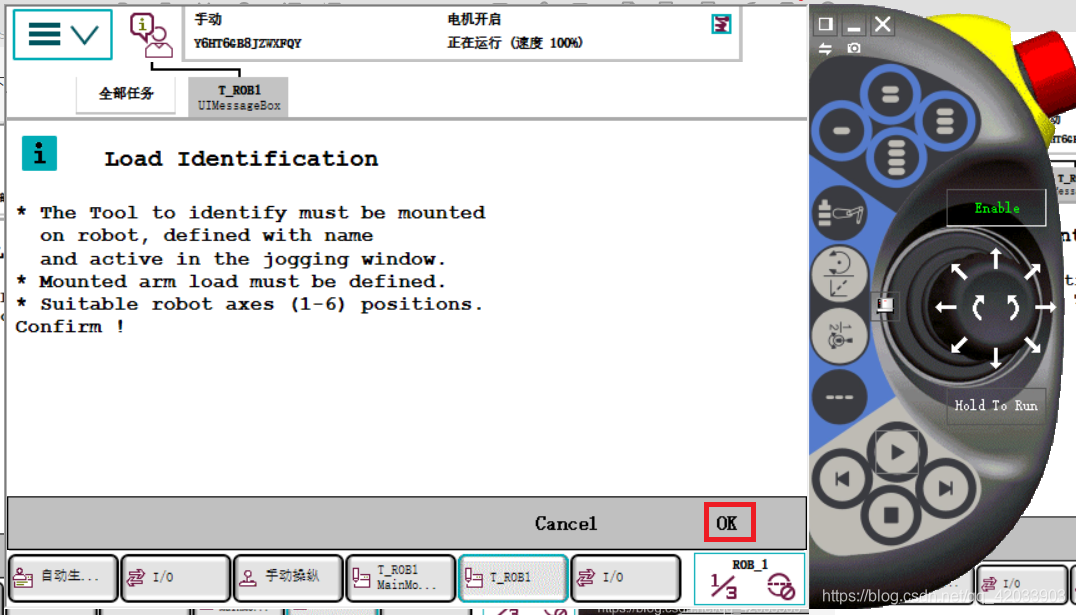
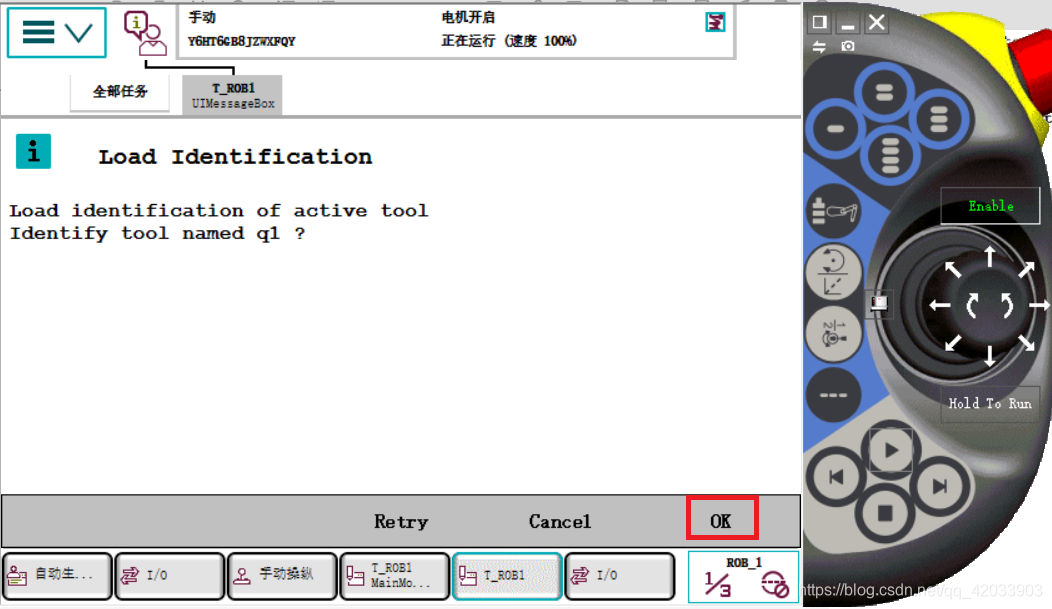
然后ok继续下一步:
这里要选择2这种运动方式:
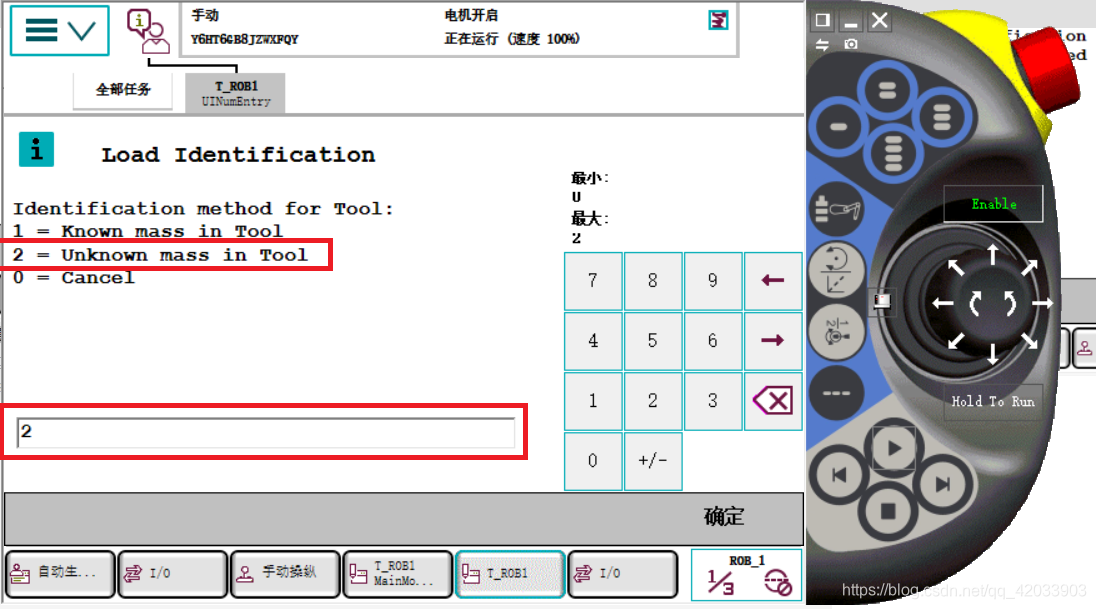
然后点击确定进入下一步。
这个是然机器人运动到的角度,如果你的空间太小,你可以选择other来进行更改角度。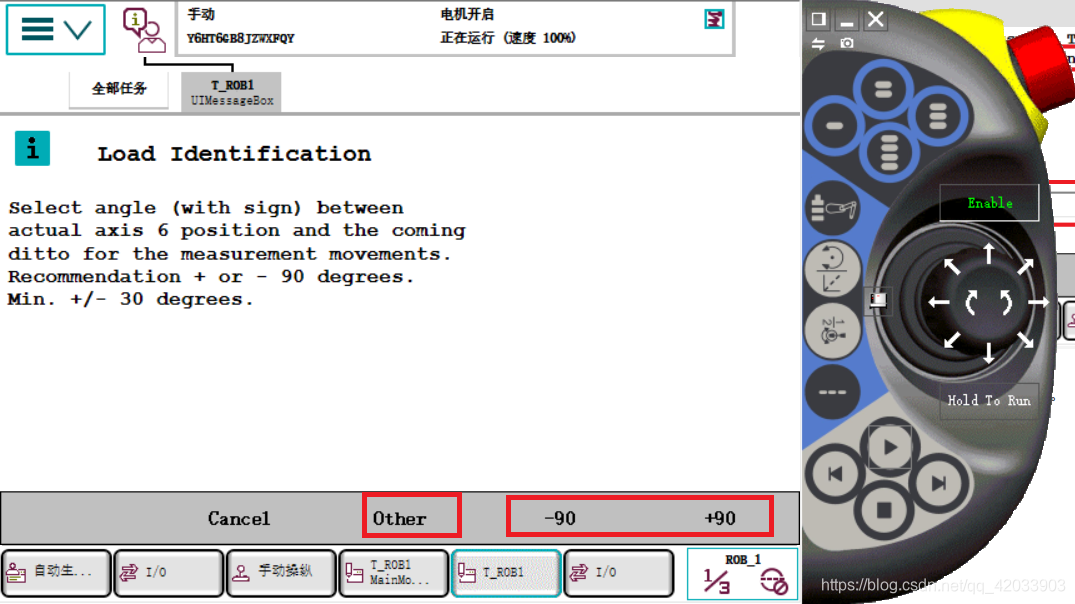
然后点击move进入下一步
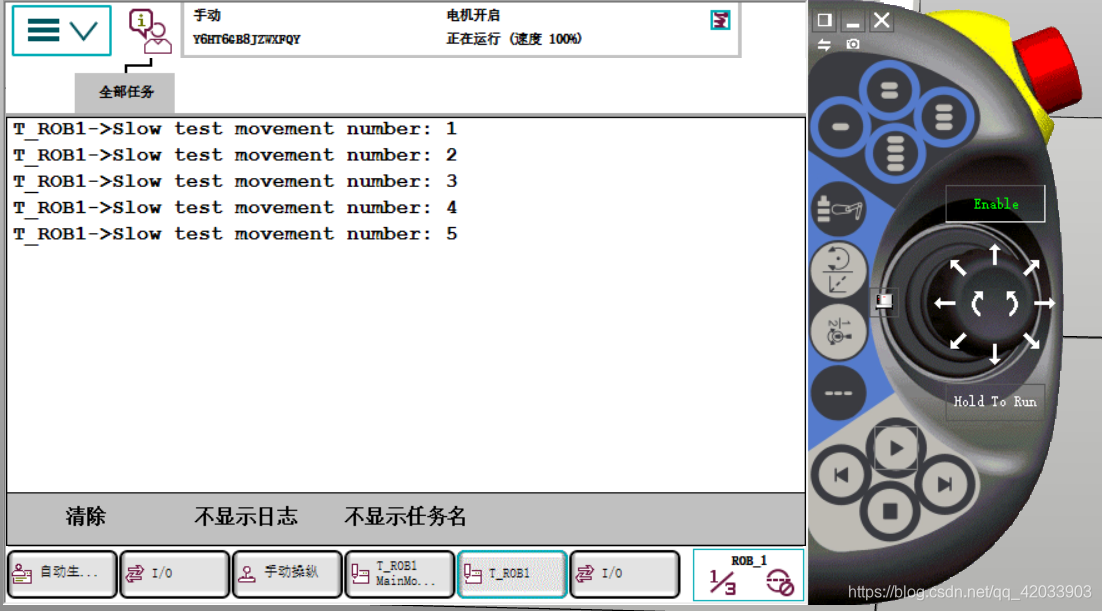
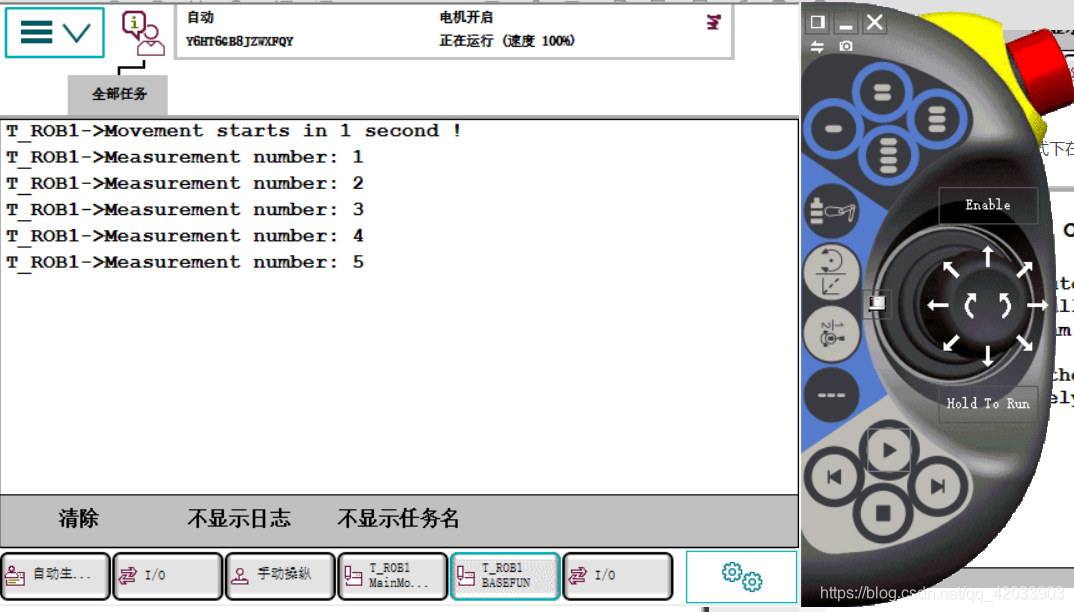
这个时候在手动的条件下开始检测:
这时我们打到自动的模式下在运行程序:
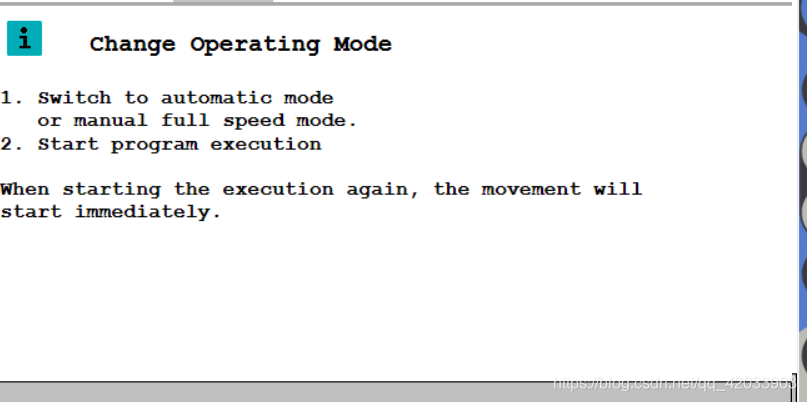
然后说让我们切回手动下在运行程序
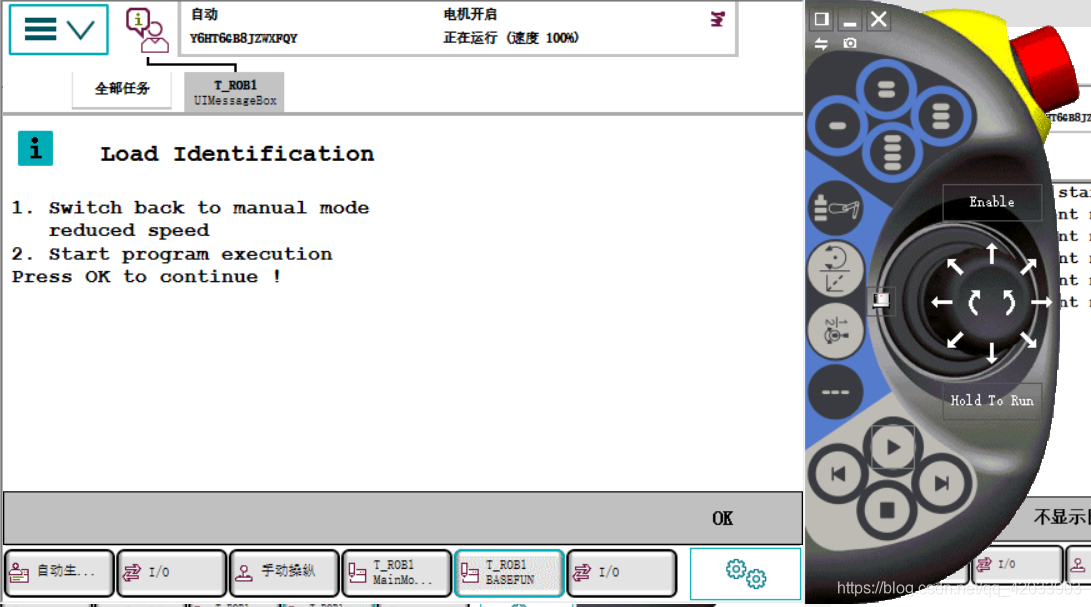
后面所弹出框的内容都点击ok,等待一小会之后就会出现你所测量的值了。
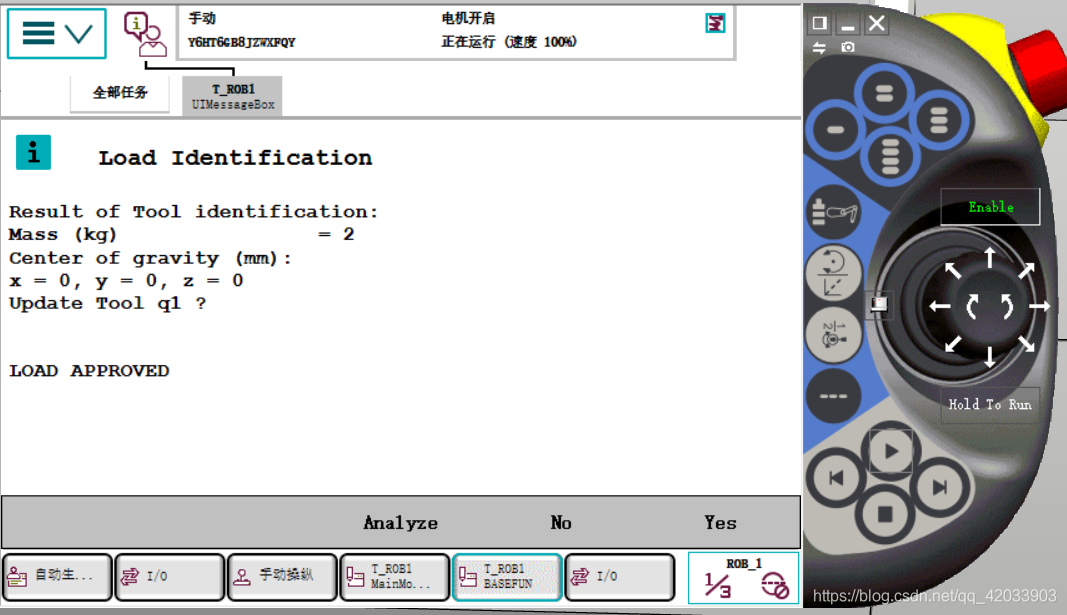
因为我是用虚拟机做的所以X,Y,Z没有偏差,实际情况是有的。
本资料仅供参考,如有不对自行改正。

















 2681
2681

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









