






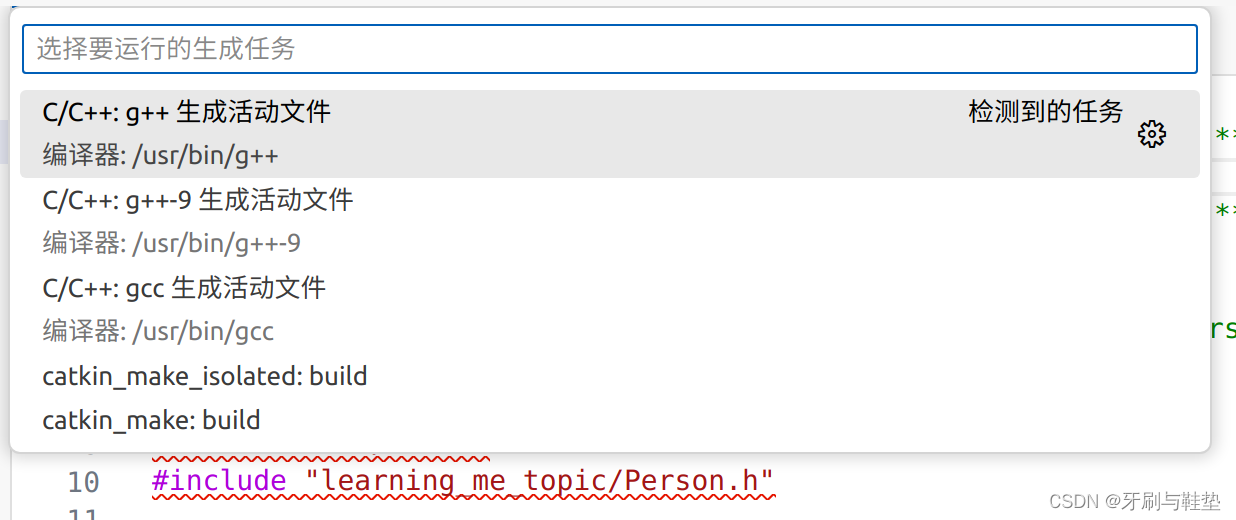
ctrl+shift+B,点击catkin_make:build的螺丝标记
工作空间下会出现一个新的文件
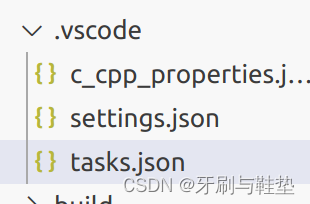
C_Cpp文件下会自动出现目录

此时,需要调试的文件中会提示没有ros.h的头文件
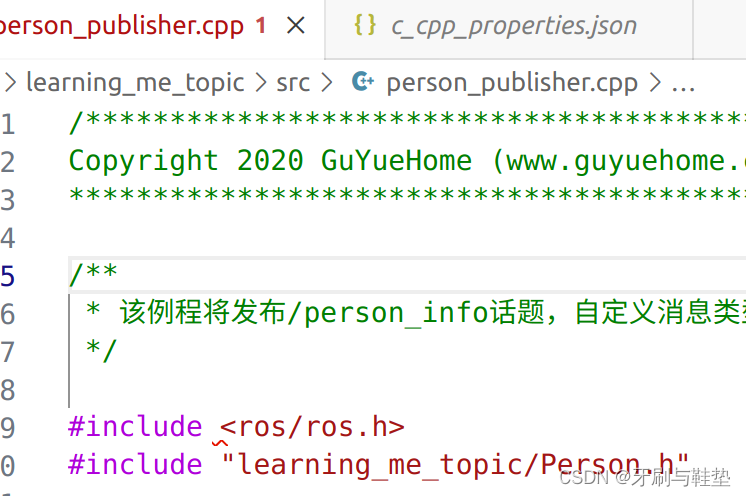
在c_cPP文件的includepath中添加/opt/ros/noetic/include
vscode下调试ROS项目,节点调试,多节点调试,roslauch调试 - 知乎
调试过程中出现的一些错误
ctrl+shift+B,点击catkin_make:build的螺丝标记
工作空间下会出现一个新的文件
C_Cpp文件下会自动出现目录
此时,需要调试的文件中会提示没有ros.h的头文件
在c_cPP文件的includepath中添加/opt/ros/noetic/include
vscode下调试ROS项目,节点调试,多节点调试,roslauch调试 - 知乎
调试过程中出现的一些错误
 551
1682
5215
1634
551
1682
5215
1634











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























