






0、安装ros插件
在扩展商店中安装ROS插件(Microsoft)
1、修改CMakeList.txt
# set(CMAKE_BUILD_TYPE "Release") // 注释Release模式
set(CMAKE_BUILD_TYPE "Debug") // 设置为Debug模式
# set(CMAKE_CXX_FLAGS_RELEASE "-O3 -Wall -g") // 注释编译器优化
编译
2、配置json文件
点击图中1处,第一次会需要creat a launch .json file,弹出一些模板,点默认gdb即可,会在.vscode文件夹下生成launch.json文件:
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": []
}
在"configurations": []中打ROS,可以自动补全ROS: Attach 或 ROS: Launch。其中,ROS: Attach 表示对一个可执行节点(node) debug,ROS: Launch 表示对一个launch 文件 debug。(在上一步模板那里也可以选ROS,但我的点不开)
补全后的:
{
"version": "0.2.0",
"configurations": [
{
"name": "ROS: Launch",
"type": "ros",
"request": "launch",
"target": "/home/lu/2.classic_method/ego-planner/src/planner/plan_manage/launch/simple_run.launch"
}
]
}
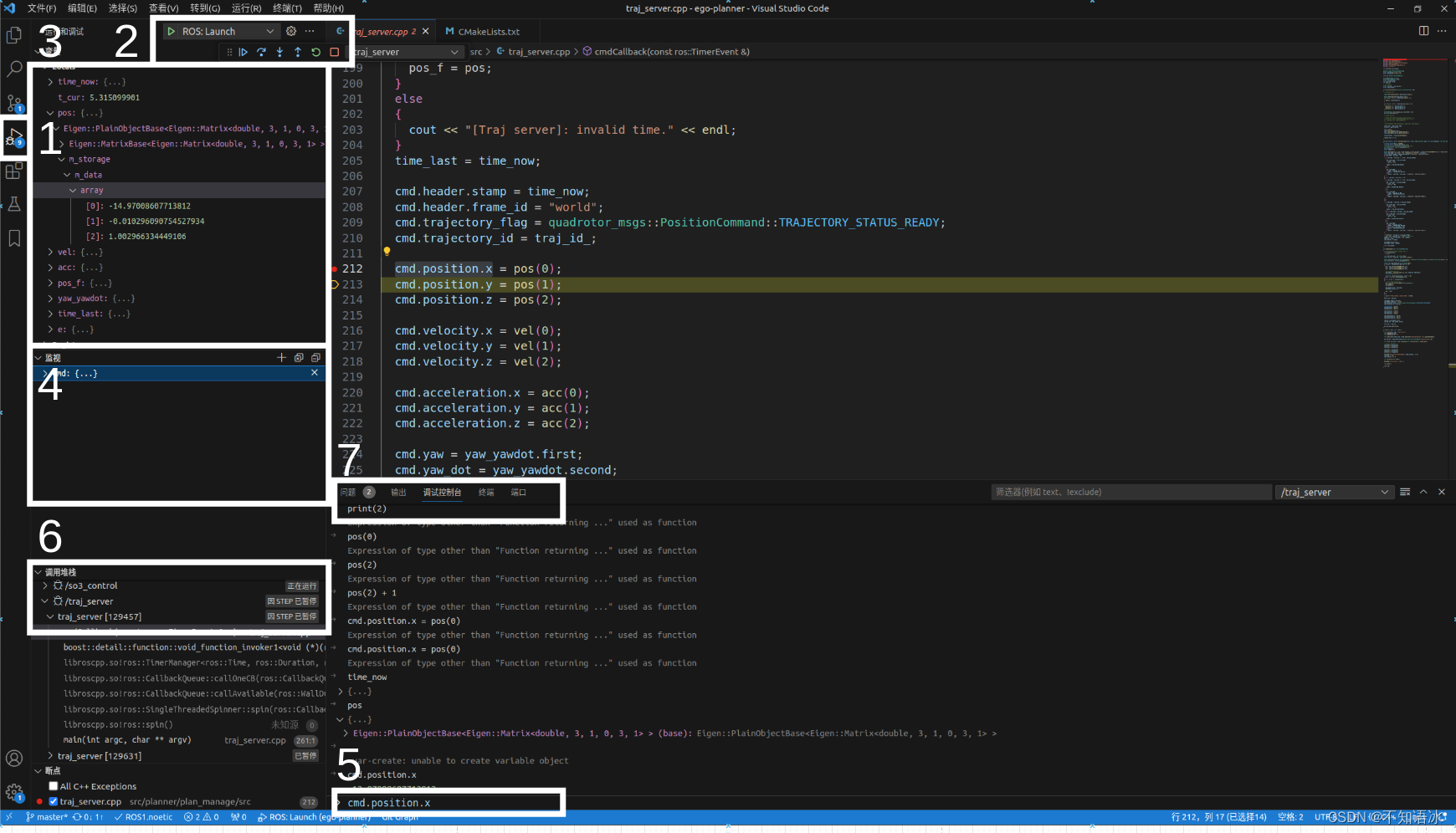
3.断点调试
剩下的就跟pycharm差不多了,2处进行单步调试,3-4处进行变量监视(右键添加到监视),感觉比起pycharm变量很多不全的…,5处可对变量进行修改和计算,不需要加;,6处是程序的调用关系,7处切换终端等
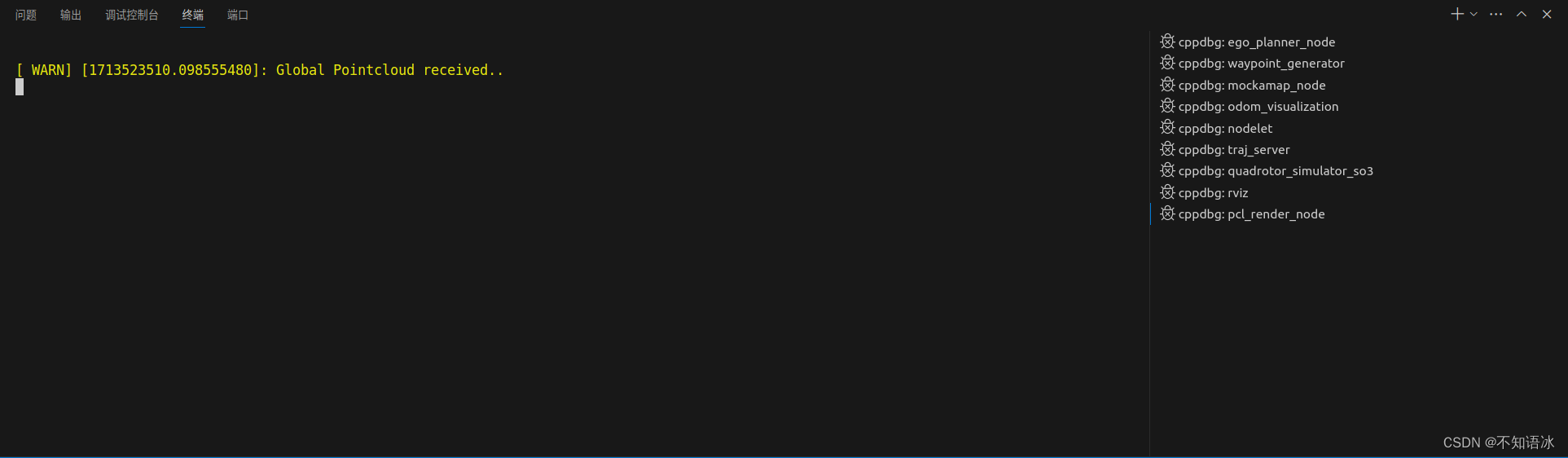
程序终止时,需要以此杀死所有运行节点(下图右侧):
参考:https://blog.csdn.net/weixin_45736684/article/details/135845156















 1265
1265











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









