







永磁同步电机的矢量控制策略(十二)一一MTPA最大转矩电流比控制
写在前面
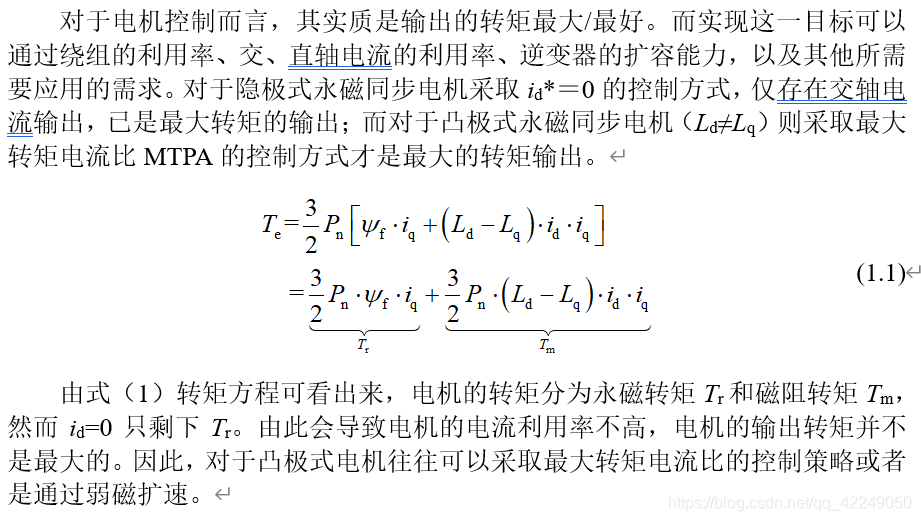
12.1 永磁同步电机的最大转矩电流比控制
最大转矩电流比控制仍是在矢量控制框架下,所与id*=0不同点在于电流环指令电流的获取不一样。MTPA关键在于推导得到转矩与电流之间的数学表达式,以下介绍两种方法:一种是拉格朗日求极值,另外一种是定义法偏导求解。
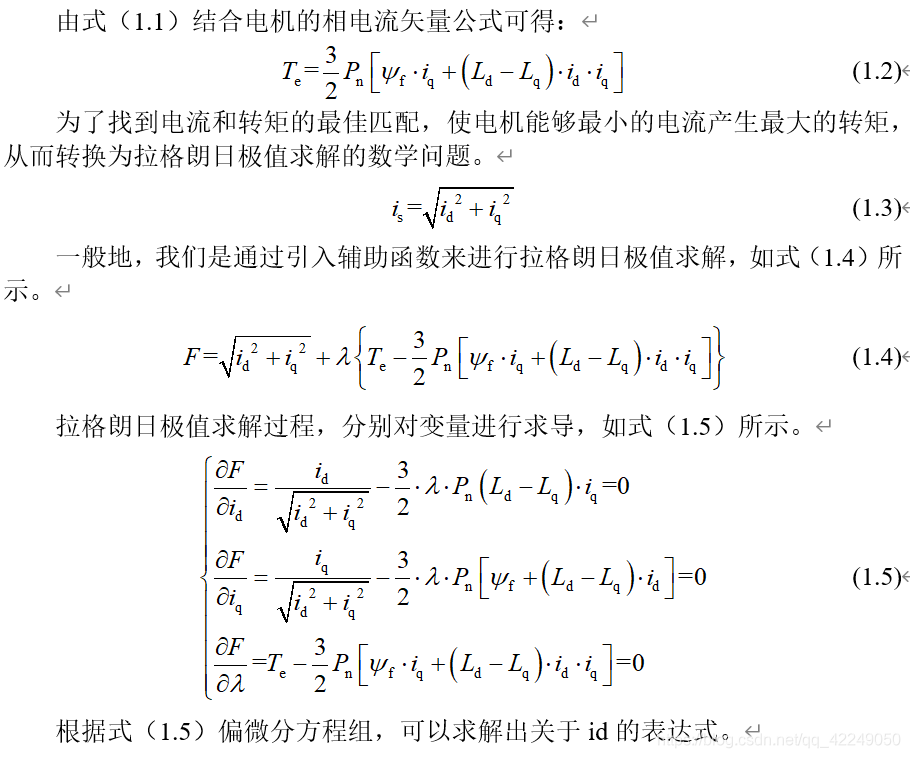
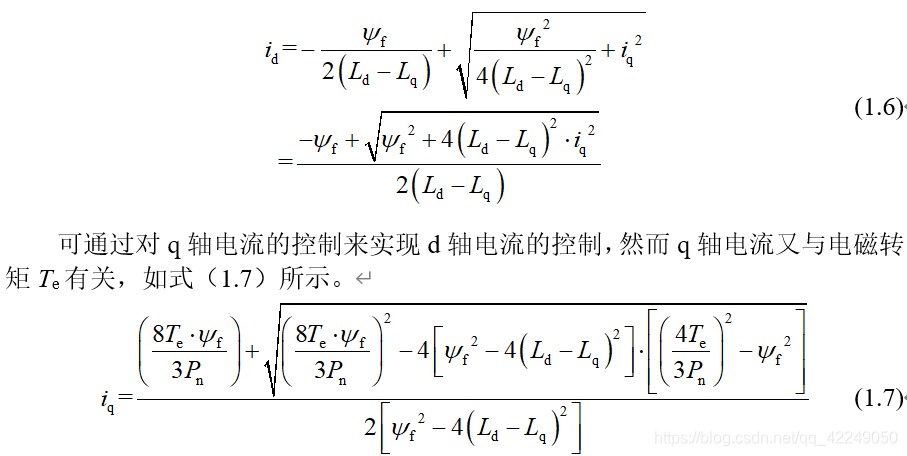
1.拉格朗日求极值
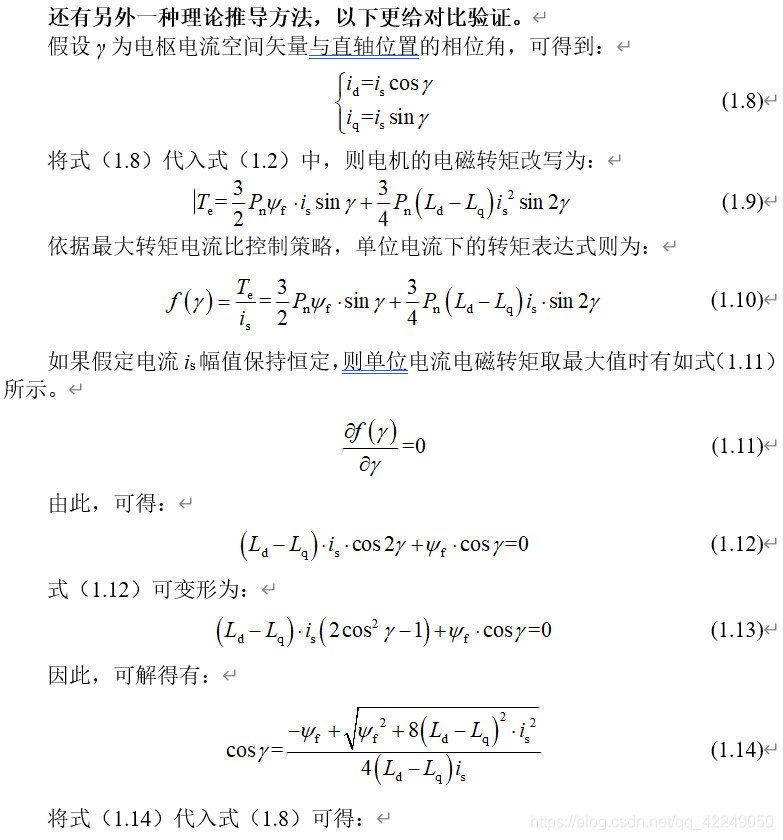
还有另外一种理论推导方法,以下更给对比验证。
2.定义法偏导求解
还有另外一种理论推导方法,以下更给对比验证。
假设γ为电枢电流空间矢量与直轴位置的相位角,可得到:
12.2 永磁同步电机的最大转矩电流比仿真
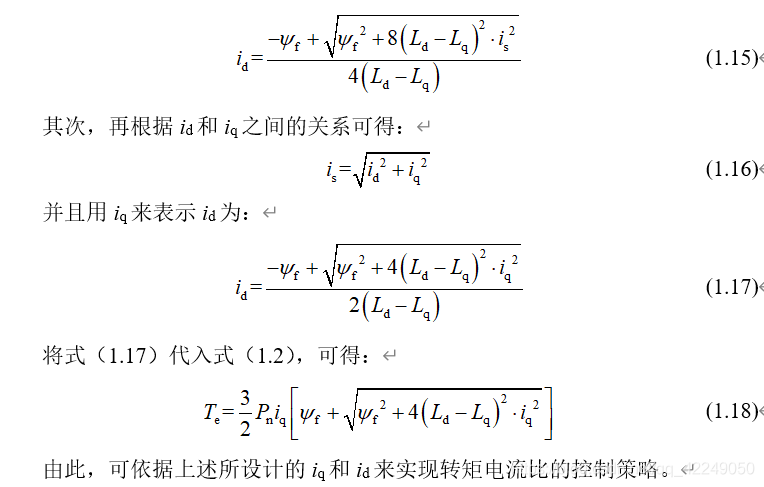
最大转矩电流比的控制策略与id*=0的控制策略的最大不同,在于电流环指令电流获取来源不同。仿真中最为关键的是转矩电流关系的实现,比如式(1.19)中的一元四次方程所表示的iq与Te之间的关系表达式:

运用仿真建模求解式(1.19)比较复杂,通常可以采取描点查表法来解决求解困难的问题,或者采取数据拟合的技术,也有采取分段拟合等改进方法。在实际编程中,可以根据此式(1.19)设定参数求解各个所需数值,利用查表法来解决转矩与电流之间的关系。
依据式(1.19)在MATLAB/Simulink仿真平台上搭建仿真模型如图1所示。
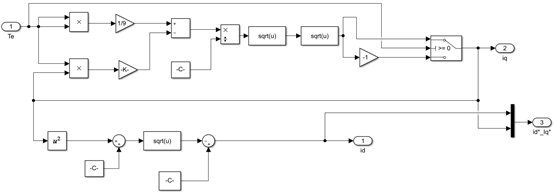
图1 转矩与电流的仿真模型图
最后依据最大转矩电流比的系统控制方框图,搭建整体系统的仿真图,如图2所示。以及仿真结果输出,如图3-6所示,分别为电机的转角、转矩和转速输出波形,以及电流输出波形。
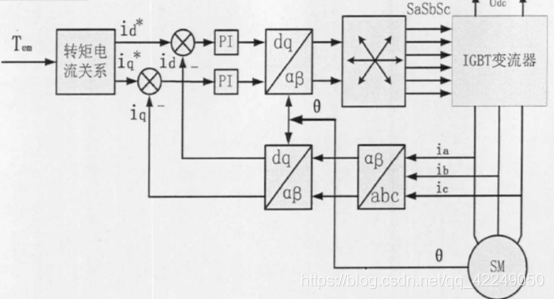
(a)永磁同步电机最大转矩电流比矢量控制系统方框图

(b)永磁同步电机最大转矩电流比矢量控制系统Simulink仿真图
图2 永磁同步电机MTPA矢量控制(a)系统结构图 (b)仿真图
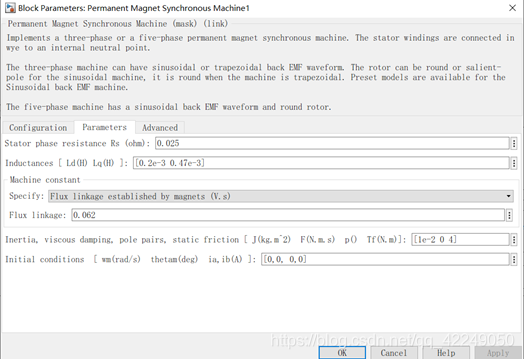
电机的运行条件和本体设置如下:
仿真设置条件为:运行时间为0.1 s,仿真解析算法为ode3,电流环的PI控制器比例积分参数分别为40和60,同时电机设置参数如下图所示:
仿真输出结果图3-6,如下所示。
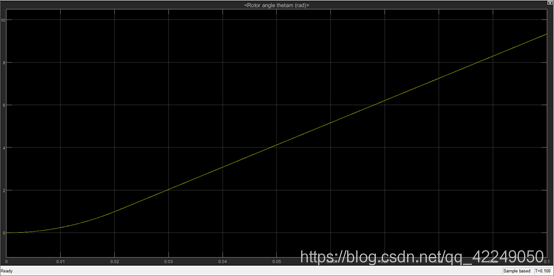
图3 永磁同步电机MTPA矢量控制电机转角波形

图4 永磁同步电机MTPA矢量控制电机转矩波形
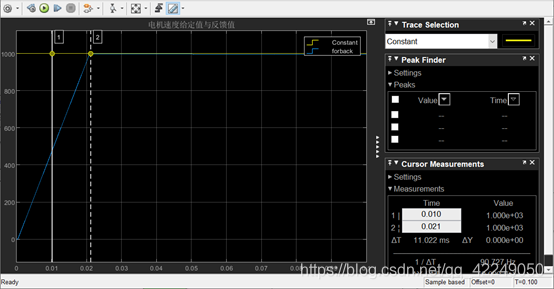
图5 永磁同步电机MTPA矢量控制电机转速波形
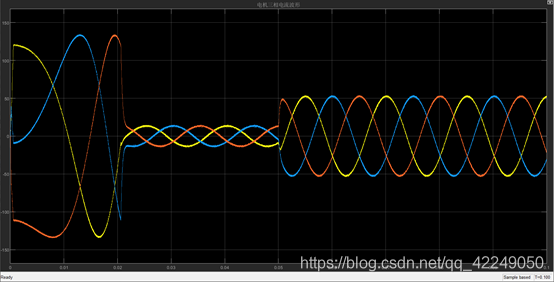
图6 永磁同步电机MTPA矢量控制电机电流波形
仿真结果分析
**由图4和图6可看出,电机在启动阶段存在较长时间的峰值转矩和紊乱电流,在电机稳态运行阶段电机转矩脉动仍较大。由图5转速输出波形可看出,实际转速与参考转速始终存在着一定的滞后跟踪,转速响应速度并不快速,但是几乎不存在超调。由此,可看出转速环采取MTPA的控制方式,使得转速的超调性能得到大大的改善。但是转速的其他性能却并不乐观,因此有必要对其参数进行整定,或者改进现有的MTPA控制方式。**常见的如结合弱磁控制与电压前馈补偿下的改进方式,或者结合观测器模型扰动补偿的控制方式,又或者是改进MTPA控制方式的转矩与电流之间关系表达式采取分段函数、或查询表的方式。这些研究有待后续的继续更新。
总结
1.转矩Te与q轴电流的关系

2.d轴电流与q轴电流的关系
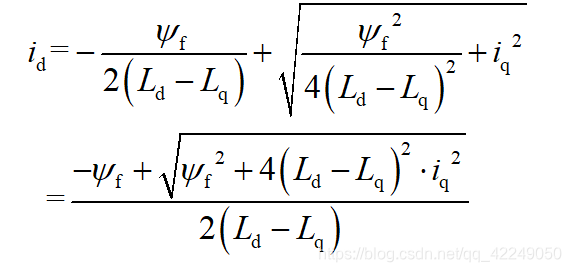
依据上叙述两个表达式可计算出d-q轴电流环的指令电流参考值。
3.MTPA控制方式的改进点
结合弱磁控制与电压前馈补偿下的改进方式,或者结合观测器模型扰动补偿的控制方式,又或者是改进MTPA控制方式的转矩与电流之间关系表达式采取分段函数、或查询表的方式。
永磁同步电机的矢量控制策略系列博客
永磁同步电机的矢量控制策略(五)——— 电流环转速环 PI 参数整定(补充部分)


















 13万+
13万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











