







1. 增加对动态场景的鲁棒性(动态SLAM)
传统的视觉SLAM算法通常假设场景是静态的,这种假设对于动态场景是不适用的。在动态场景中,物体的位置和姿态会发生变化,这会对视觉SLAM算法的精度和鲁棒性造成很大的影响。因此,研究如何检测和跟踪动态物体、如何对动态物体进行建模和如何将动态物体的信息融合到SLAM算法中是非常重要的。
2、提高算法的精度和效率(特征提取和匹配、GPU和FPGA加速)
视觉SLAM算法的精度和效率是非常关键的,因为它们直接影响着算法在实际应用中的可用性。为了提高精度,可以研究如何使用更强大的特征描述符、如何对相机运动进行更准确的估计以及如何使用更高级的优化算法。为了提高效率,可以研究如何使用GPU加速、如何减少计算量以及如何使用分布式计算等技术。

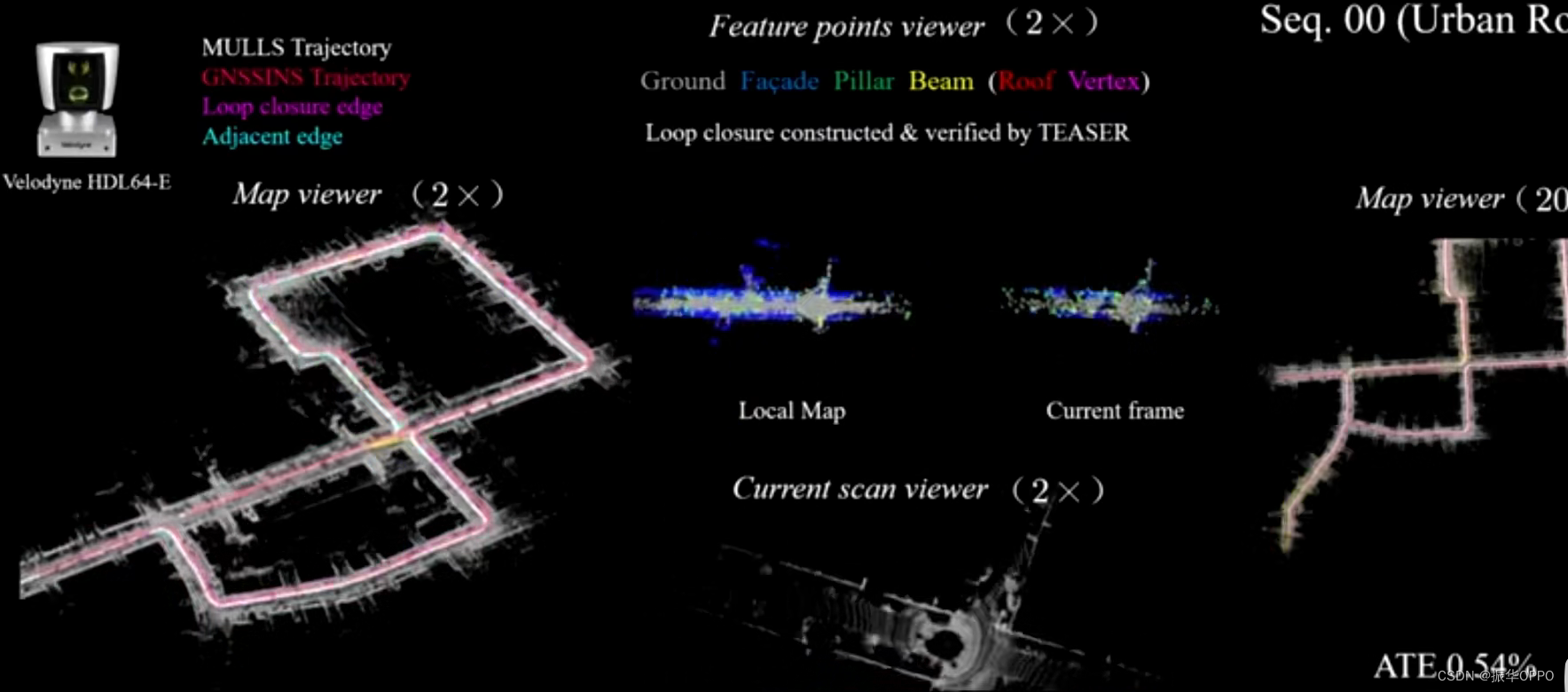
3、多传感器融合(相机+IMU)
传统的视觉SLAM算法通常依赖于相机和IMU等传感器,但这些传感器的精度和范围都有限制。因此,利用其他传感器信息,例如激光雷达或者RGB-D相机,来提高SLAM算法的精度和鲁棒性是非常有意义的。多传感器融合可以通过多种方式实现,例如基于卡尔曼滤波器的方法、基于因子图的方法、基于深度学习的方法等。

4、深度学习在SLAM中的应用(语义SLAM)
深度学习在计算机视觉领域有着广泛的应用,而在SLAM中的应用也在逐渐被探索。例如,可以使用深度学习来提取更强大的特征描述符、如何使用深度学习来估计相机姿态或场景深度等。此外,深度学习还可以用于场景理解、目标检测、语义分割等任务,从而提高SLAM算法的精度和鲁棒性。
5、实时性和鲁棒性的平衡(不同的应用场景)
视觉SLAM算法需要在实时性和鲁棒性之间做出平衡。在某些应用中,如自主导航和机器人操作,实时性非常重要,而在其他应用中,如虚拟现实,精度和稳定性更为重要。因此,改进算法以平衡实时性和鲁棒性是非常重要的研究方向。可以通过优化算法、改进传感器设计、使用合适的硬件等方式来实现这一目标。


















 1814
1814

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











