







1、添加ROS软件源
sudo sh -c ‘. /etc/lsb-release && echo “deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main” > /etc/apt/sources.list.d/ros-latest.list’
2、添加密钥
sudo apt-key adv --keyserver ‘hkp://keyserver.ubuntu.com:80’ --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
————————————————
3、更新软件源
sudo apt update 4、配置及更换最佳软件源
4、配置及更换最佳软件源
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
5、做完上面的四步就可以开始安装ROS了
因ubuntu版本的不同其安装指令也有可能不同,我的是ubuntu20.04 执行下面的命令来安装:
sudo apt install ros-noetic-desktop-full
配置环境变量,方便在任意 终端中使用 ROS。
echo “source /opt/ros/noetic/setup.bash” >> ~/.bashrc
source ~/.bashrc
7.安装构建依赖
在 noetic 最初发布时,和其他历史版本稍有差异的是:没有安装构建依赖这一步骤。随着 noetic 不断完善,官方补齐了这一操作。
首先安装构建依赖的相关工具
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
Copy
ROS中使用许多工具前,要求需要初始化rosdep(可以安装系统依赖) – 上一步实现已经安装过了。
sudo apt install python3-rosdep
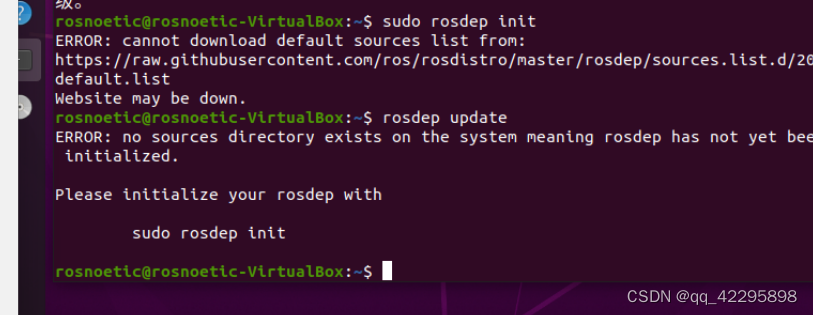
初始化rosdep
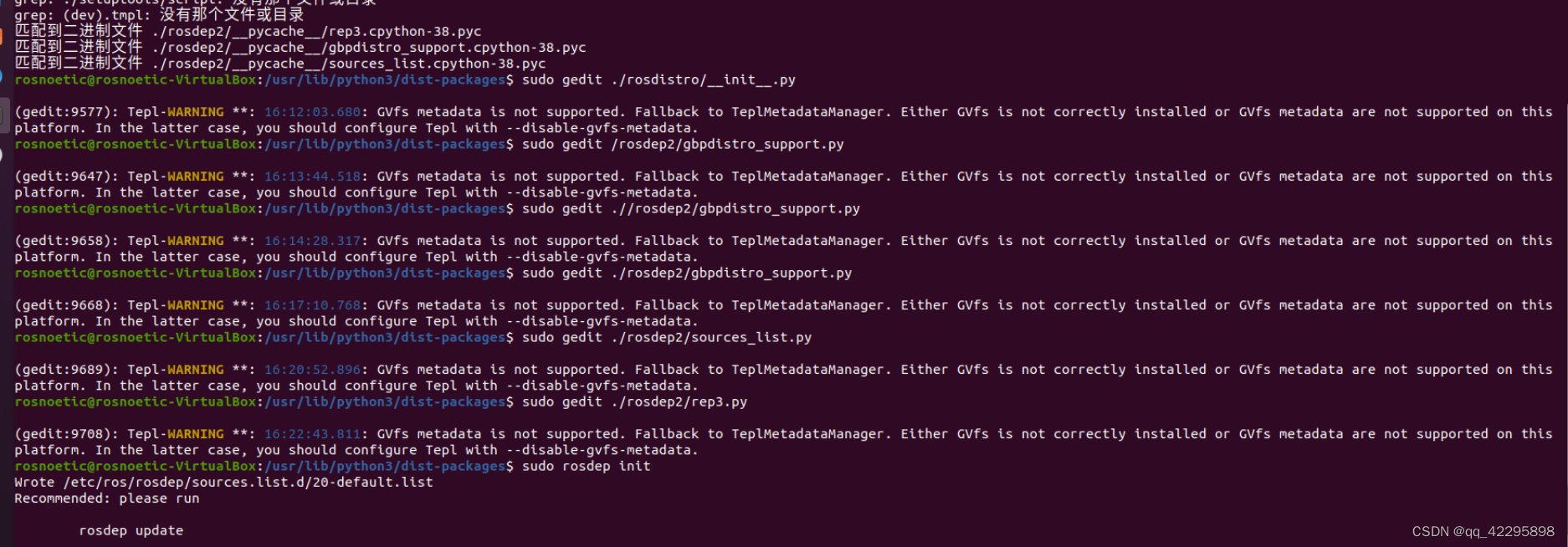
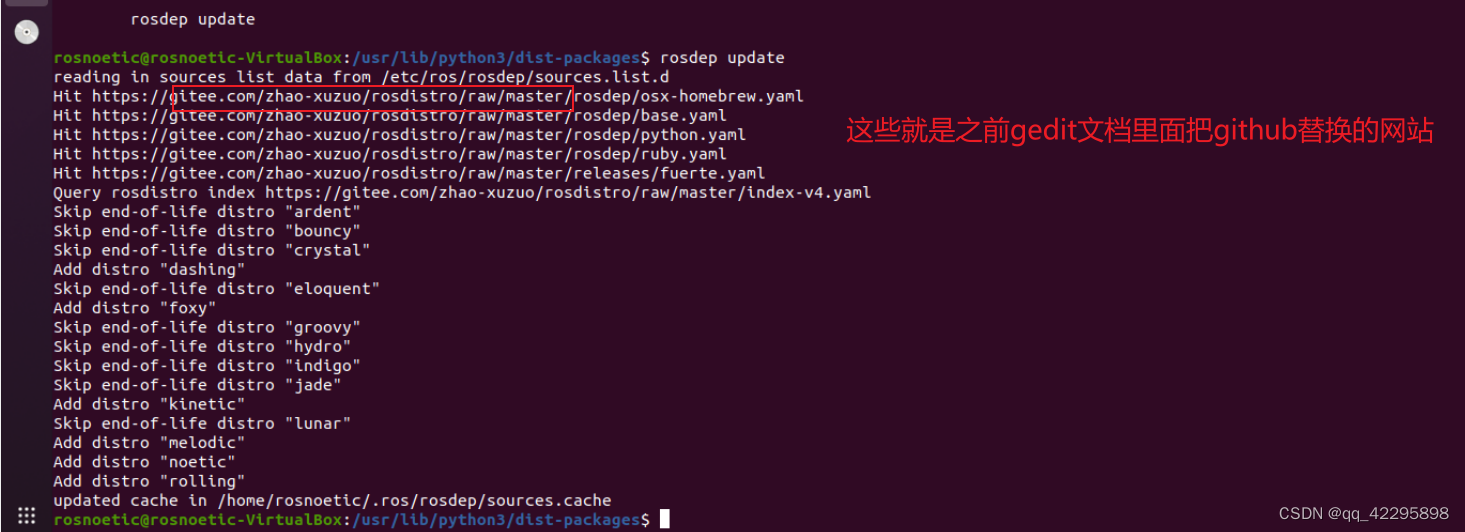
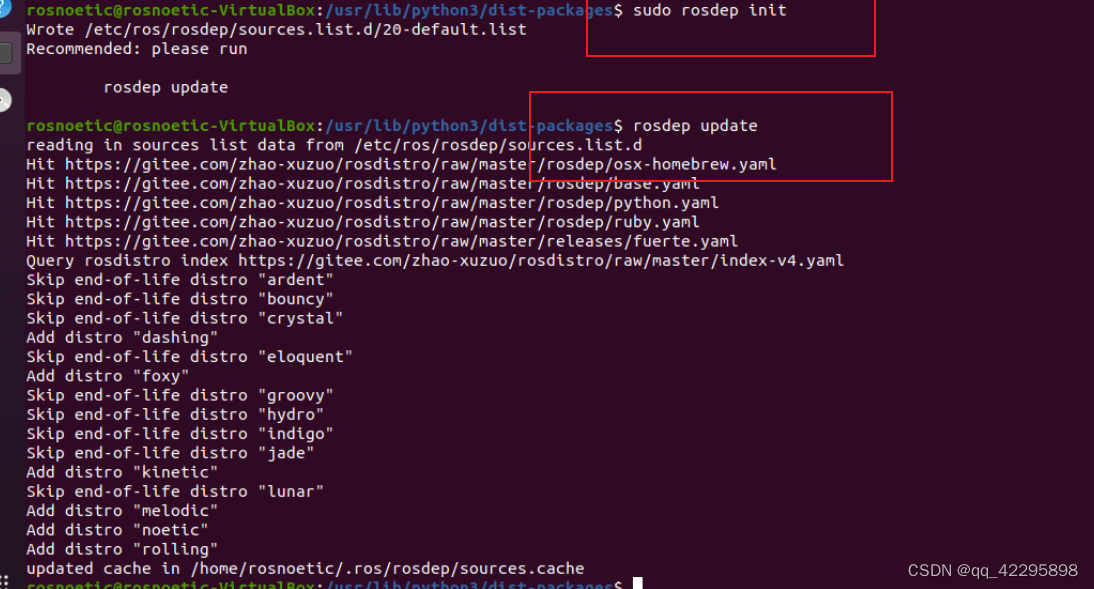
sudo rosdep init
rosdep update
 rosnoetic@rosnoetic-VirtualBox:~$ cd /usr/lib/python3/dist-packages/
rosnoetic@rosnoetic-VirtualBox:~$ cd /usr/lib/python3/dist-packages/
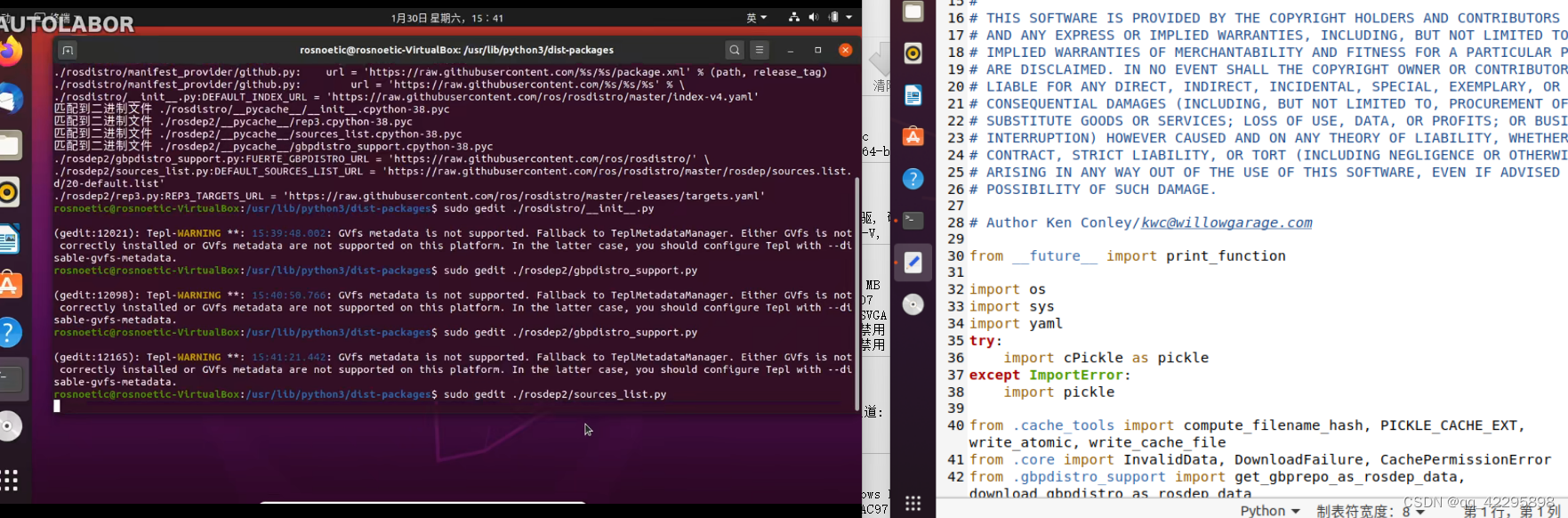
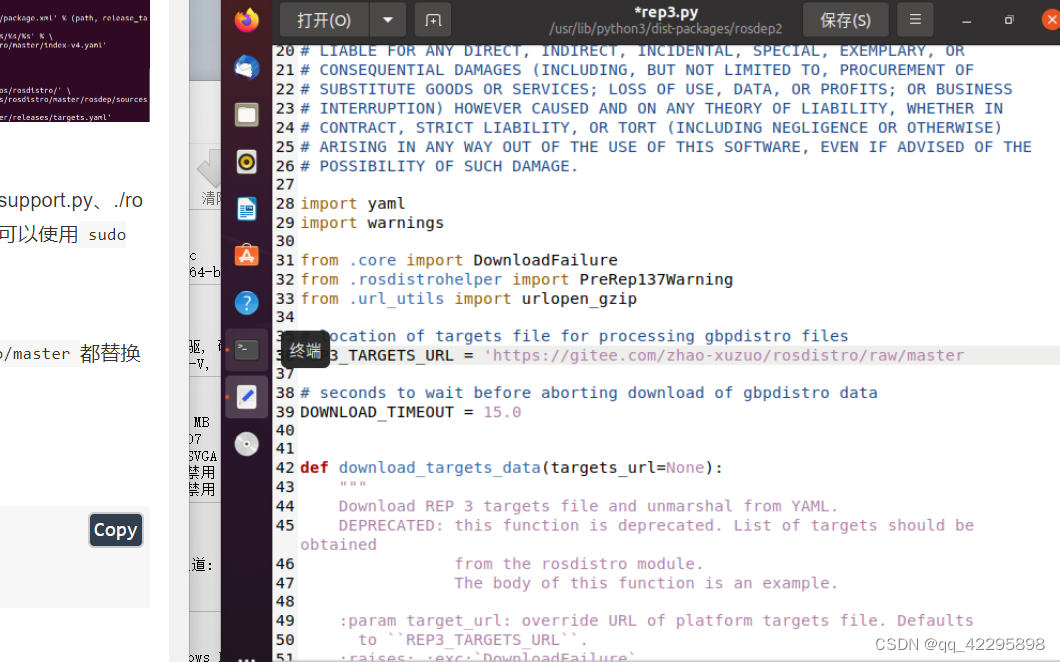
rosnoetic@rosnoetic-VirtualBox:/usr/lib/python3/dist-packages$ find . -type f | xargs grep “raw.githubusercontent”
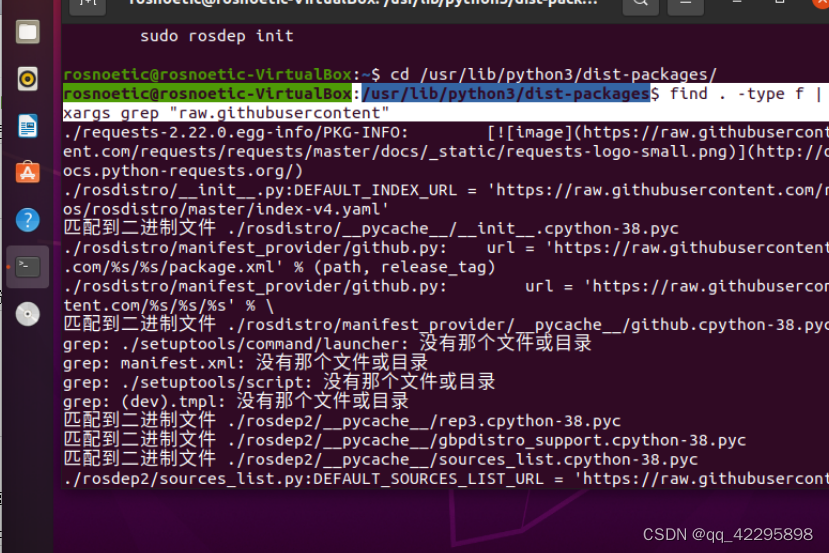


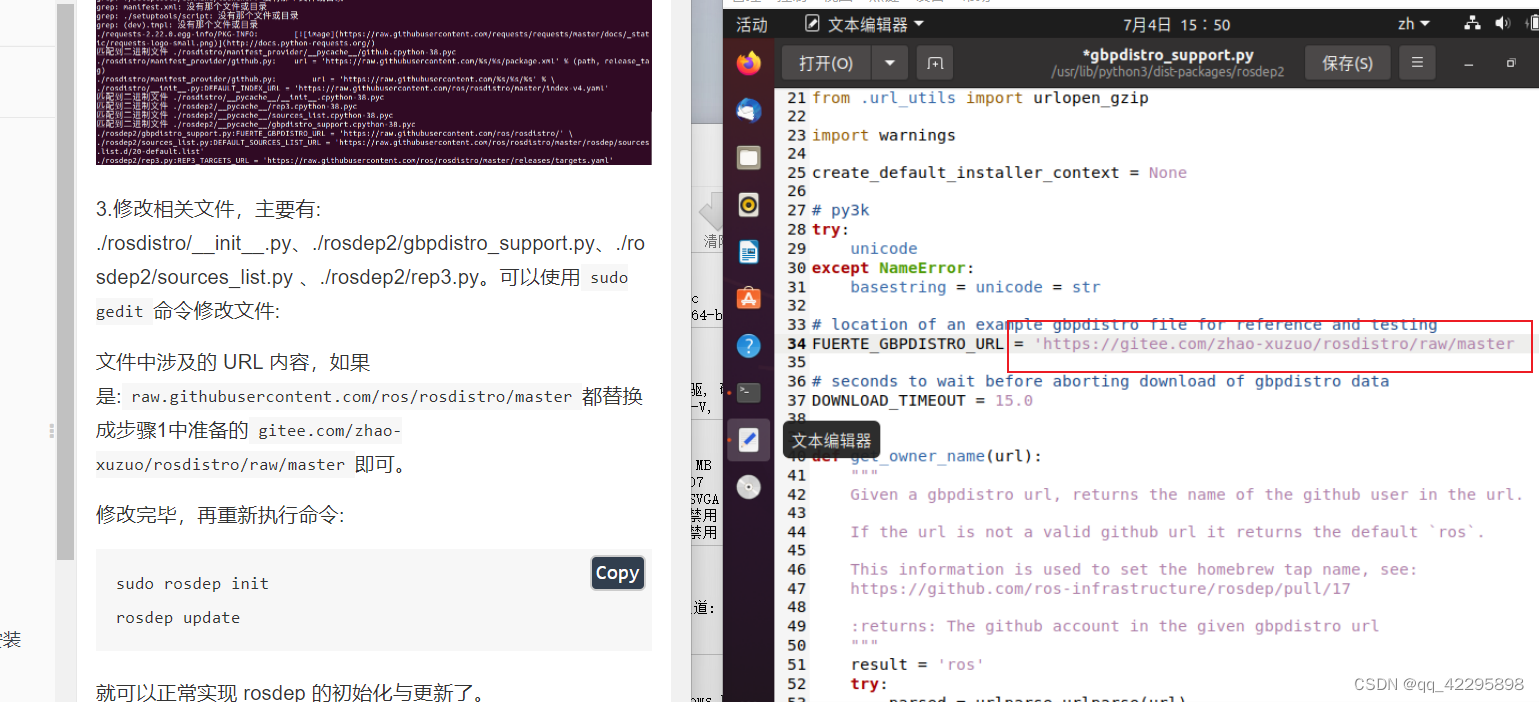
cd /usr/lib/python3/dist-packages/
find . -type f | xargs grep “raw.githubusercontent”
















 5448
5448











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









