







 AUTOSAR 4.0.3引入了Partial Network (PN) 概念,旨在实现功能场景下控制器的最小化唤醒,节省能源。PNC与Network Management (NM) 相关,控制网络通信通道,并与NM PDU及IPDU有特定关系,用于在满足功能需求的同时优化网络通信。
AUTOSAR 4.0.3引入了Partial Network (PN) 概念,旨在实现功能场景下控制器的最小化唤醒,节省能源。PNC与Network Management (NM) 相关,控制网络通信通道,并与NM PDU及IPDU有特定关系,用于在满足功能需求的同时优化网络通信。
目录
一、简介
Autosar4.0.3开始引入Partial Network的概念:在功能场景需要,且有需要对外进行信息交互的时候,建立网络通信通道。将网络通信分组控制,在满足功能实现的前提下,找到一种控制器最小化唤醒的路径,达到省电的效果。VFC/PNC用于实现Partial Network ,ECU 的开发要理解VFC/PNC与ECU之间的关系。
二、PNC和NM之间的关系
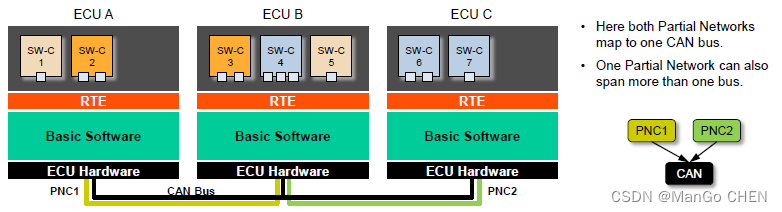
PNC的定义不被局限在某一子网络内部,其定义可以跨越多个子网络及不同的总线形式(目前支持CAN总线及FlexRay总线)。但是PNC如何跨越多个自网络及不同总线,就需要知道PNC和NM(Network Management)之间的关系。
 已下架不支持订阅
已下架不支持订阅


















 1976
1976

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











